0. 목차
- '첨단 운전자 지원 시스템'이란?
- 주행상황을 인식하기 위한 '센서'
- 전자 제어 장치(ECU)
- H/W와 S/W의 통합 기술
- '시스템' 및 'SoC 아키텍처'의 고도화·최적화
- 운전자 맞춤형 시스템 개발

1. '첨단 운전자 지원 시스템'이란?
'첨단 운전자 지원 시스템(ADAS: Advanced Driving Assistance System)'은 '국제 자동차 기술자 협회(SAE: Society of Automotive Engineers)'에서 분류한 '자율주행 레벨0(비자동화)' 및 '자율주행 레벨 1(운전자 보조)'에 해당하는 '차로 이탈 경고', '전방 추돌 경고' 등 외부 위험상황을 운전자에게 영상 등으로 정보나 경로를 제공하는 보조 장치로부터 출발하였다. 그러나 '자율주행 레벨 2 (부분 자동화)' 및 '자율주행 레벨 3 (조건부 자동화)'에 이르러서는 수동적 경고에서 벗어나 '차간 거리의 제어', '긴급제동 시스템' 등 적극적으로 차량을 제어하는 형태로 발전하였다.
일례로 최초의 '첨단 운전자 지원 시스템(ADAS)'은 주행기능을 제공하는 '크루즈 컨트롤(Cruise Control)'을 바탕으로 시작되었다. '크루즈 컨트롤(Cruise Control)'이란 가속 페달을 밟지 않아도 지정된 속도로 차를 주행할 수 있는 기능이다. '크루즈 컨트롤'은 장거리 주행 시 운전자의 피로도를 낮추며, 불필요한 가속·감속을 최소화하여 연료 효율을 높게 유지하기 위한 목적으로 사용되었다. 이후 '스마트 크루즈 컨트롤(SCC: Smart Cruise Control)'과 '차로 이탈 경고(LDW: Lane Departure Warning)' 등이 등장하였다. 이로써 가속과 감속이 능동적으로 이루어지는 '자율주행 레벨 1'에 해당하는 기능이 구현되었다. 그 밖에 '주차 보조(PA: Parking Assist)', '후측방 충돌 경고(BCW: Blind-Spot Collision Warning)' 등의 기능도 등장하였다.
이후에는 '차로 이탈 경고(LDW)'와 '스마트 크루즈 컨트롤(SCC: Smart Cruise Control)'이 동시에 작동함으로써 '자율주행 레벨 2'에 도달하였다. 또 '후측방 충돌 방지 보조(BCA: Blind-Spot Collision-Avoidace Assist)', '차로 이탈 방지 보조(LKA: Lane Keeping Assist)'에서 '전방 충돌 경고(FCW: Forward Collision Warning)', '전방 충돌 방지 보조(FCA: Forward Collision-Avoidance Assist)', '고속도로 주행 보조(HDA: Highway Driving Assist)' 등으로 점차 발전하였다. 그 밖에도 '후방 교차 충돌 방지 보조(RCCA: Rear Cross-traffic Collision-Avoidance Assist)', '안전 하차 보조(SEA: Safe Exit Assist)', '후방 주차 충돌 방지 보조(PCA: Reverse Parking Collision-Avoidance Assist)' 등으로 기존 기능의 보강·강화가 이루어지고 있다. 아울러 '비상 자동 긴급 제동', '음주시동 잠금장치', '졸음운전 감지장치', '주의분산 인지·방지 장치', '사고기록 장치', '지능형 최고 속도 제어장치', '차로 유지 지원장치', '측면 충돌 탑승자 보호장치' 등 다양한 기능을 가진 차세대 '첨단 운전자 지원 시스템'도 등장했거나 등장할 전망이다.
2. 주행 상황을 인식하기 위한 '센서'
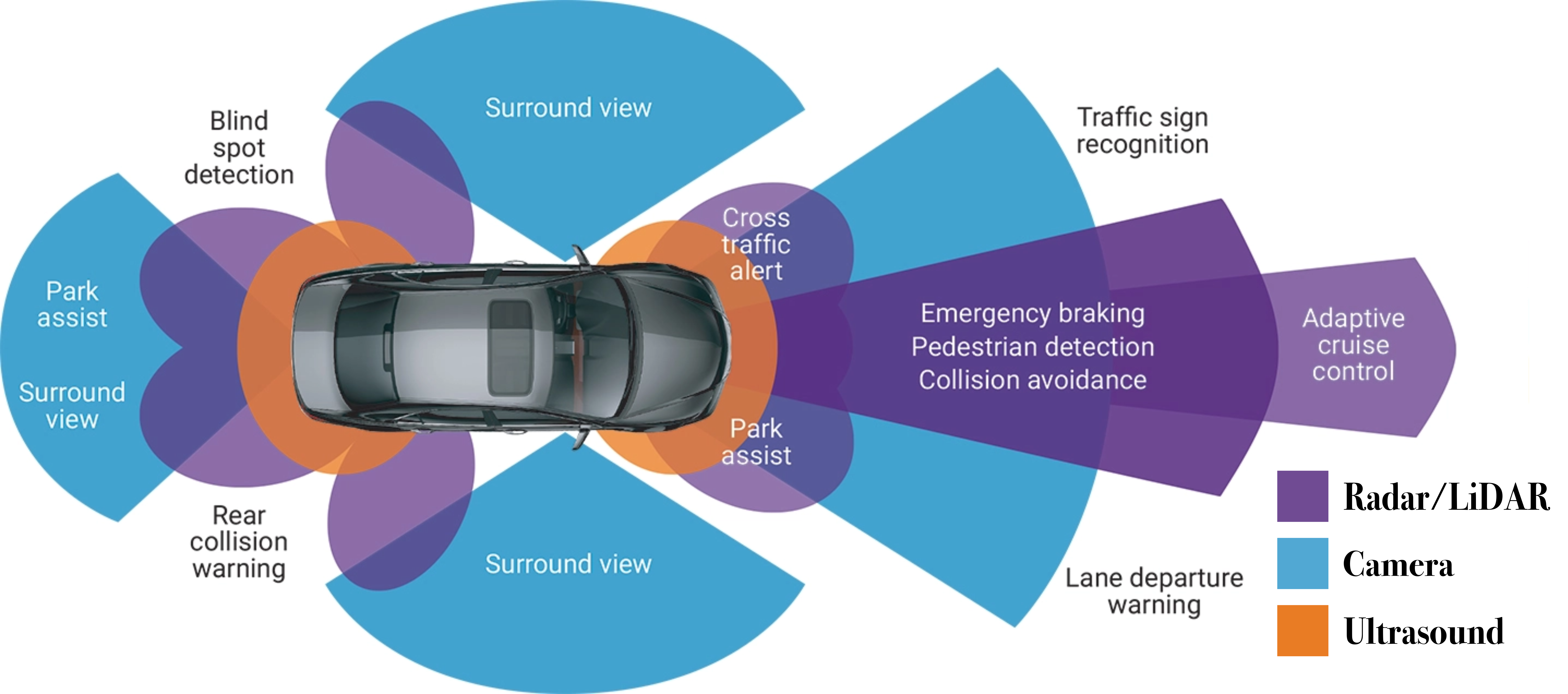
'첨단 운전자 지원 시스템(ADAS)'은 차량에 각종 '센서(Sensor)'를 장착하여 외부환경을 인지하고, 이를 바탕으로 차량 운전자의 상황 판단력 및 반응속도를 높이는 기능을 하며, 컴퓨터 시스템을 통해 '인식(Awareness)', '판단(Judgment)', '제어(Control)'하여 차량의 효율성·안정성·편의성을 향상시키고 있다.
현재의 주행 상황을 인식하기 위한 센서는, 각기 다른 기술적 특성에 의해 '감지 범위'나 '적용 기능'에 차이가 있다. 그중 '카메라 센서(Camera Sensor)'는 광학 형태로 다양한 물체를 동시에 인지하는 데 강점이 있어 빠르게 성장하고 있다. '레이더 센서(Radar Sensor)'는 방사된 전기파의 반사 시간을 계산하여 물체를 인지한다. '라이다 센서(Lidar Sensor)'는 이와 유사하나 근적외선 '레이저(Laser)'를 활용하고 있다. '초음파 센서(Ultrasonic Sensor)'는 활용 거리의 제한이 존재하여 주로 단거리용으로 이용되고 있으며, 장거리 감지 기술 개발이 없을 경우 수요 확대가 어려운 편이다. '적외선 센서(Infrared ray sensor)'는 나이트 비전(Night Vision)' 등에 사용되지만 비용이 비싸 대량 적용이 어려워 비용 절감이 요구된다.
| 센서 | 설명 |
| 카메라 센서(Camera Sensor) | 광학 형태로 다양한 물체를 동시에 인지 |
| 레이더 센서(Radar Sensor) | 방사된 전자기파의 반사 시간을 계산하여 물체를 인지 |
| 라이다 센서(Lidar Sensor) | 근적외선 레이저를 활용하여 물체를 인지 |
| 초음파 센서(Ultrasonic Sensor) | 초음파를 활용하여 물체를 인지 |
2-1. 센서간 융합 확대
또한 현재까지 개발된 센서들은 '카메라(Camera)'와 '레이더(Radar)' 센서를 묶어서 적용하고 있으나, 주변 환경에 대한 인지와 관련하여 명확한 한계점을 가지고 있다. 일례로 센서의 '검측 각도(Detection Angle)' 변화가 큰 경우, 좌우 회전 상황에서 반대 차량과 맞닿을 경우, 오르막길에서 도로 위 구조물이 있는 곳을 주행할 경우, 강한 빛이 비치는 경우, 센서 온도가 매우 높은 경우, 터널·야간 등 주위가 어두울 때 '헤드 램프(Head Lamp)'를 켜지 않은 경우, 운전자의 크기가 1m 이하 혹은 20cm 이하의 물체 등의 경우에도 인식이 어렵다. 이에 따라 '주변 상황의 인지 범위' 및 '반응속도'의 증가를 위한 '센서 퓨전(Sensor Fusion)' 방식이 도입되고 있다. 즉, 이종 센서 간의 데이터를 융합하여 장애물의 위치를 선별하여, 가장 위협적인 장애물을 판단함으로써 신뢰성 있게 인식하기 위한 융합 기술이다.
일반적으로 센서는 높은 수준의 '감도(Sensibility)', '선형도(Linearity)', '안정도(Stability)', '신뢰성(Reliability)' 등이 필수적으로 요구된다. '신뢰성(Reliability)' 측면에서는 온도·진동 등 '기계적 신뢰성' 외에도, 센서의 전자화에 따른 '전자파에 대한 내성', '정전기 등 전자기적 신뢰성'을 모두 갖출 수 있어야 한다. 최근 '다기능 센서소자', '전자회로', '통신 기능', '마이크로프로세서(Microprocessor, 연산장치와 제어장치를 1개의 작은 실리콘 칩에 모아놓은 처리 장치)'를 통합한 센서 시스템인 '스마트 센서(Smart Sensor)'가 등장하면서 소형화와 네트워크화도 진행 중이다.
그 밖에 이 시스템에 사용되는 센서는 1° 미만의 미세한 변화는 자체적 '캘리브레이션(Calibration)'으로 정상 동작이 가능하다. 하지만 이를 넘어설 경우 경고등이 점등되거나 시스템이 동작하지 않을 수 있다. 경우에 따라 '안전운행 모드(Safety Mode)'로 운전이 제한된다. 그러나 이에 대한 '자체적 수리', '보정 서비스'가 부족하다. 이 또한 초기 단계에 불과하여 정기적 정비·검사 항목의 지정 등과 같은 '상용화', '운용'과 관련된 기술 및 제도적 보완도 요구된다.
2-2. 개별 센서의 고성능화·최적화
'센서 퓨전(Sensor Fusion)' 기술은 다종의 센서로부터 감지되는 데이터를 바탕으로 '첨단 운전자 지원 시스템'의 '인식-판단-제어' 영역 중 판단영역의 기술 혁신에 활용되고 있다. '센서 퓨전(Sensor Fusion)' 기술은, 시스템의 대형화를 달성하기 위해 센서를 소형화하고, 가격을 낮추고자 하는 기술에 해당한다. 또한 여러 센서들의 기술발전과 병행하여 개별 센서의 장단점을 반영한 기술 융합 과정을 반복함으로써 '성능', '강건성', '가격(Price)', '패키지(Package)' 개선 등이 시도되고 있다. 아울러 보다 복잡한 기능을 달성하기 위해서는 센서의 융합뿐만 아니라, 각 센서로부터 입수되는 데이터의 융합도 중요한 과제로 제시된다.
특히 자율주행 레벨의 상승을 위해 '중복성(Redundancy)'을 고려한 상호보완적인 다수의 센서가 필요하므로, 최적의 센서 구성에 많은 노력을 기울이고 있다. '중복성(Redundancy)'이란 많은 유형의 데이터가 여러 형태의 중복 요소를 가지고 있는 것을 말한다. 주요 센서별로 개발 동향을 살펴보면, 현재 모든 완성차 업체들은 '카메라 센서(Camera Sensor)'와 '레이더 센서(Radar Sensor)'를 필수적으로 채택하고 있으며, '라이다 센서(LIDAR Sensor)'와 '초음파 센서(Ultrasonic Sensor)'를 선택적으로 사용하는 경향을 보이고 있다. 하지만 '라이다 센서'의 가격을 현실화하고, 환경에 민감한 단점을 극복하여, '중복성(Redundancy)'를 확보하고 신뢰도를 높여 '레이더 센서', '카메라 센서' 등과 같이 필수 센서로 널리 활용될 전망이다. '레이더 센서(Radar Sensor)'는 소형화·저가화를 통해 '초음파 센서'를 대신한 고성능 주차 센서로 응용하며, 송수신 채널의 증대를 통해 고해상도화 개발도 진행 중이다.
그 밖에 '카메라 센서(Camera Sensor)'는 '해상도' 및 '화각(렌즈의 촬영 범위)' 확대에 따라 지원하는 기능의 종류 및 성능도 증대되고 있다. 중국계 반도체 회사 '옴니비전(OmniVision)'은 2022년 8월 12일 중국 매체 아이지웨이를 통해 "차량용 이미지 센서 업계 전체가 최대 감지 거리가 250m인 800만 화소 차량용 카메라를 적극 개발하고 있다."고 말했다. 한편 '화각'은 최근 100° 이상의 광각을 통한 근거리 표지판 인식이 가능한 기능의 다변화도 이루어지고 있다. 물체 인식 방식에서도 '딥러닝(Deep Learning)' 기반의 통합 다중 스케일의 학습 방식을 추가한 인식의 정확도·신뢰도 향상이 이루어지고 있다. '라이다 센서'의 경우에는 기존의 360° 측정용 회전형 라이다 센서 대신 대규모 양산화를 위한 '소형 솔리드', '미러(Mirror)' 방식의 단방향 '라이다 센서' 위주로 개발이 진행되고 있다.
3. 전자 제어 장치(ECU)
이미 말했듯이 현재 '첨단 운전자 지우너 시스템'의 중요한 기술들인 '자동 긴급 제동(AEB)', '전방 충돌 방지 보조(FCA)', '전방 충돌 경고(FCW)', '차로 이탈 방지(LKA)', '차로 이탈. 경고(LDW)', '차로 유지 보조(LFA)', '차선 유지 지원(LKAS)', '후측방 충돌회피(ABSD)', '어라운드 뷰 모니터링(AVM)', '하향등 제어 보조(LBA)', '운전자 주의 경고(DAW)', '스마트 크루즈 컨트롤(SCC)' 등은 기존의 경보 수준에서 벗어나 적극적 제어 수준으로 진화하고 있다. 자동차가 처리해야 할 외부 정보량의 증가에 따라, 이를 종합적으로 분석·판단·제어하기 위한 기술이 요구된다.
기존의 단일 센서 기반으로 단순 상황에 대처하던 초기의 기술과는 달리, '다수의 장애물', '돌발 상황', '복수의 센서'에서 전송되는 다량의 데이터를 처리하기 위해 높은 수준의 판단·제어 기술이 요구된다. 이를 위해서는 '전자 제어 장치(ECU: Electronic Control Unit)' 및 '임베디드 소프트웨어' 관련 기술이 중요하다.
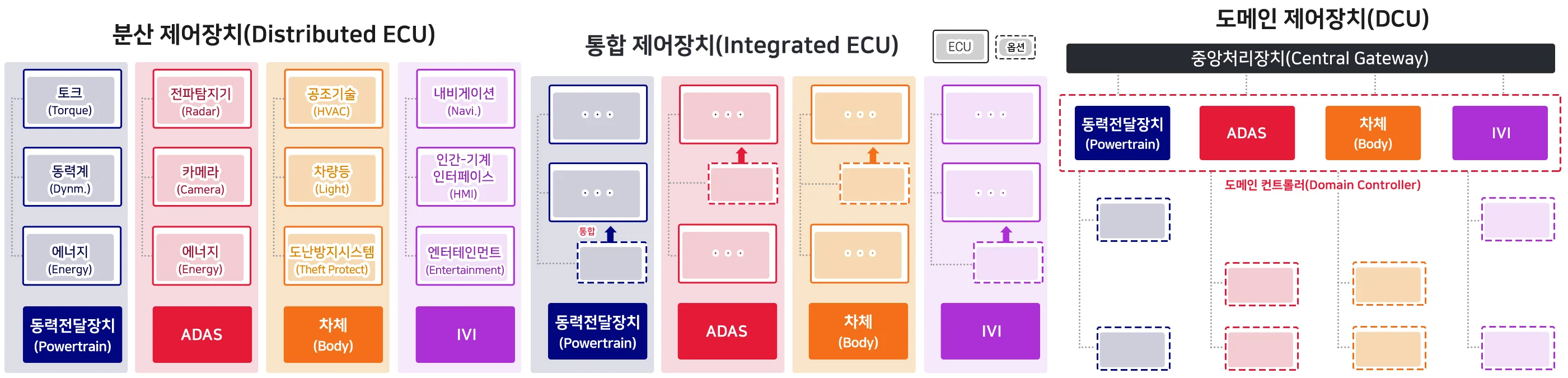
'전자 제어 장치(ECU: Electronic Control Unit)'는 전장부품에서 분산된 단일 기능을 독립적으로 수행하도록 설계되었으나, 최근 많은 수의 전자식 기능을 포함함에 따라 '전자 제어 장치(ECU)'의 수가 중저가형 자동차 30개에서 최고급 자동차 100개까지 증가하는 추세이다. 따라서 '첨단 운전자 지원 시스템(ADAS)'뿐만 아니라 '동력전달장치(Powertrain)', '차체(Body)', 'IVI(In Vehicle Infotainment, 차량 내 인포테인먼트 시스템)'의 분야에서 비용 절감 및 전력 효율성 향상을 고려한 통합 ECU 컨트롤러인 '통합 제어장치(Intergrated ECU)'가 도입되고 있다. 아울러 '전자 제어 장치(ECU)'에 각 기능의 통합 관리가 가능한 '중앙처리장치(CGW: Central Gateway)'를 추가한 '도메인 ECU'도 있다. '도메인 ECU(Domain ECU)'는 '도메인 제어장치(DCU: Domain Control Unit)'라고도 부른다. '도메인 제어장치(DCU)'는 시간당 약 4TB의 데이터를 처리할 수 있으며, '다중 센서의 융합', '3D 로컬라이제이션' 등이 가능하다.
일반 PC를 제외한 각종 전자제품·정보기기 등에 설치된 '마이크로 프로세서(Microprocessor, 연산장치와 제어장치를 1개의 작은 실리콘 칩에 모아놓은 처리장치)'에 미리 정해진 특정 기능을 수행하는 소프트웨어를 내장시킨 시스템을 '임베디드 시스템(Embedded System)'이라 하고, 여기에 내장된 소프트웨어를 '임베디드 소프트웨어(Embedded Software)'라고 한다. '임베디드 소프트웨어(Embedded Software)'의 경우, 앞에서 언급한 기능들을 구현하도록 돕고 있다. 하지만 비중의 증가와 함께 전자 장치의 오류로 인한 사고도 증가하고 있다. 따라서 S/W의 개발에서 발생하는 복잡성과 다양성을 극복하고자, 개방형 차량용 플랫폼의 표준화 및 개발·연구의 일환으로 표준 API S/W를 사용하려는 시도가 나타났다. 신규 S/W의 '개발 용이성 확보', '기존 응용프로그램의 개선을 위한 버그 수정', '다량의 자원 재사용에 따른 자원절약' 등을 목표로 하고 있다.
4. H/W와 S/W의 통합 기술
'첨단 운전자 지원 시스템(ADAS)'의 기술발전에 필요한 주요 기술로써, 다양한 센서 관련 '데이터(Data)', '부품(Parts)'을 통합하여 완성차 내에서 신뢰성 있는 장치·시스템으로 활용하기 위한 통합 기술도 매우 중요하다. 통합 플랫폼으로써 수십 개의 '첨단 운전자 지원 시스템(ADAS)'을 제어하는 '도메인 ECU'를 구성하기 위해서는 H/W와 S/W의 통합 기술이 요구된다. 세부적으로는 '도메인 ECU의 아키텍처 설계 기술', '미들웨어의 설계 기술', '애플리케이션 SWC의 개발·통합 기술' 등이 있다.
4-1. '도메인 ECU'의 아키텍처 설계 기술
'도메인 ECU(Domain ECU)'에 대한 요구사항으로는 '센서 처리(Sensor Processing)', '센서 퓨전(Sensor Fusion)', '차량 제어(Vehicle Control)'를 위한 많은 계산이 필요하므로, 멀티 코어 '시스템 온 칩(SoC: System on Chip, 여러 가지 기능을 가진 시스템을 하나의 칩으로 구현한 기술집약적 반도체)' 설계를 활용한 고성능이 요구되된다. 또한 자율주행 기능을 지원하기 위한 ISO 26262 ASIL C/D 등 안전 표준의 준수가 요구된다. '도메인 컨트롤러(Domain Controller)'는 기존 자동차 '네트워크 인터페이스(Network Interface)' 및 '센서(Sensor)' 연결을 위한 '이더넷(Ethernet)', 'Raw 데이터 비디오 인터페이스' 등이 요구된다. 또 고성능 '시스템 온 칩(SoC)'에 대응하기 위한 '마이크로컨트롤러' 기반의 지원도 필요하다. '마이크로컨트롤러(Microcontroller)'란 프로세스를 보통 좁은 범위 내에서 정밀하게 제어하는 장치를 말한다. '모듈화(Modularization)'와 '확장성(Expandability)'에서는 '소프트웨어 구성품(SWC: Software Component)'과 '플랫폼(Platform)'과의 독립, 기타 성능·안정성 요구사항에 따른 처리요소의 추가·제거도 가능해야 한다. 아울러 많은 SWC의 '적절한 통합', '복잡도의 관리' 등도 요구된다.
- 도메인 ECU의 H/W 아키텍처 설계 기술: H/W의 '아키텍처(Architecture, 컴퓨터 시스템 전체의 설계 방식)'는 '차량용 마이크로 컨트롤러', 'FPGA 기반 범용 처리 엔진', '영상처리 장치', '센서 처리 장치' 들로 구성되며, 장치 간 '확정적 이더넷(ED Ethernet)' 스위치에 의해 서로 연결되도록 설계되고 있다.
- 도메인 ECU의 S/W 아키텍처 설계 기술: 한편, 각 처리 장치별 '운영체제(OS)'는 최적 적합 방식에 따라 선택 사용되도록 한다. 그리고 다양한 OS로 이루어진 솔루션에서, 공통 실행 환경 및 API를 제공하기 위해, 각 OS 위에 '제네릭 미들웨어 레이어(Generic Middleware Layer)'를 두고 AUTOSAR RTE 통신 타입 등으로 연결하는 방식을 채택하기도 한다.
4-2. 미들웨어의 설계 기술
'미들웨어(Middleware)'는 '분산 컴퓨팅(Distributed Computing)' 환경에서 서로 다른 기종의 '하드웨어(Hardware)'나 '프로토콜(Protocol)', '통신환경' 등을 연결하여, '응용프로그램(Application)'과 '그 프로그램이 운영되는 환경' 간에 원만한 통신이 이루어질 수 있게 하는 소프트웨어를 말한다.
'미들웨어(Middleware)'는 AUTOSAR RTE 등으로 통신을 구현하여, 내부 시그널을 OS 별로 상용화된 프로토콜인 '이더넷(Ethernet)' 통신 스택으로 '맵핑(Mapping)'하고 있다. 또한 모든 주요 '태스크(Task, 작업)'를 정해진 스케줄에 기반하여 '결정론적 알고리즘(Deterministic Algorithm)'에 입각한 방식으로 조정된다. '결정론적 알고리즘(Deterministic Algorithm)'이란 예측한 그대로 동작하는 알고리즘으로, 어떤 특정한 입력이 들어오면 언제나 똑같은 과정을 거쳐서 언제나 똑같은 결과를 내놓는다.
또 '미들웨어(Middleware)'는 안전 표준을 준수하고 'SWC(Software Component)'가 비휘발성·휘발성 메모리에 접근하여 저장소·데이터 관리 측면에서 이식성·투명성을 갖도록 설계하고 있다. 그 밖에 '진단(Diagnosis)', '캘리브레이션(Calibration)', '플래싱(Flashing)' 측면에서는 '마스터/슬레이브(master/seval)' 방식으로 구현하여 외부에서는 전체 '전자 제어 장치(ECU: Electronic Control Unit)'를 하나의 단일 객체로 인식하도록 설계하고 있다.
4-3. '애플리케이션 SWC'의 개발·통합 기술
아울러 '도메인 ECU(Domain ECU)'용 '소프트웨어 구성품(SWC: Software Component)'의 개발·통합은 크게 '플랫폼 릴리즈(Platform Release)' → '단일 SWC 통합 → '시스템 릴리즈(System Release)' 3단계로 이루어지게 된다.
- '플랫폼 릴리즈(Platform Release): '플랫폼 릴리즈(Platform Release)' 단계에서는 플랫폼 S/W의 환경을 설정하고 빌드하여, SWC 공급업체에게 릴리즈하는 단계이다.
- 단일 SWC 통합: '단일 SWC 통합' 단계는 SWC 공급업체가 플랫폼 상에서 '응용프로그램(Application)'을 통합하고, 미리 정의된 리소스 제한 내에서 '소프트웨어 구성품(SWC: Software Component)'를 테스트하는 단계이다.
- 시스템 릴리즈(System Release): '시스템 릴리즈(System Release)' 단계에는 SW 통합업체가 모든 SWC를 통합하고 완전하게 '빌드(Bulid)'된 결과를 '차량(Car)' 혹은 '테스트 벤치(Testbench)'에 통합하기 위해 '완성차 업체' 및 'SWC 공급업체'로 전달하고 있다.
5. '시스템' 및 'SoC 아키텍처'의 고도화·최적화
자율주행 수준은 향후 레벨 3에서 5까지 지속적으로 향상될 전망이다. 이에 따라 '첨단 운전자 지원 시스템(ADAS)'은 '시스템(System)' 및 '시스템 온 칩(SoC: System on Chip, 여러 가지 기능을 가진 시스템을 하나의 칩으로 구현한 기술집약적 반도체)'의 '아키텍처(Architecture)'를 최적화하기 위해 '이기종 아키텍처(Heterogeneous Architecture)' 등이 도입되고 있다.
'이기종 아키텍처(Heterogeneous Architecture)'는 일반적으로 '첨단 운전자 지원 시스템(ADAS)'의 '신호 프로세싱 체인(Signal Processing Chain)'상 'Low Level 프로세싱', 'Mid-Level 프로세싱', 'High-Level 프로세싱'으로 구성된다. 이에 따라, 다량의 'raw Data(미가공 데이터)'를 처리하는 'Low-Level 프로세싱'과, 복잡한 알고리즘에 따라 처리하는 'High-Level 프로세싱', 객체 인식 및 시스템의 처리 방향을 설정하는 'Mid-Level 프로세싱' 간의 맵핑을 통하여 기능 및 처리 효율을 최적화하고 있다. 특히, 각 Level 별로 서로 다른 아키텍처를 구현하여 최적화 및 수행하도록 하는 것이다.
아울러 각 '신호 프로세싱 체인(Signal Processing Chain)'의 '세그먼트(Segment)'별로 가장 효율적인 프로세싱을 '아키텍처 레벨(Architecture Level)로 '매핑(Mapping)'함으로써, 효율적으로 기능을 달성하는 기술이 개발 중이다. 각 데이터의 '실시간 프로세싱(Real-Time Processing)'을 위하여 'Low-Level 프로세싱'을 '전용 가속장치' 혹은 '다중 데이터 흐름(SIMD: Single Instruction Multiple Data)' 파이프라인으로 매핑함으로써, 전반적인 소프트웨어의 '오버헤드(Overhead, 부담)'를 줄일 수 있다.
6. 운전자 맞춤형 시스템 개발
기존의 '첨단 운전자 지원 시스템(ADAS)'은 기능 및 안전중심의 기술개발이 이루어져왔다. 하지만 최근에는 운전자의 운전 스타일이나 선호도 등을 반영한 연구·개발이 진행되고 있다. '운전자 맞춤형'의 개념으로써, 운전자와 자동차의 의사소통 시 운전자가 학습 없이 자동차를 운전하거나, 자동차가 전달하는 정보를 운전자가 직관적으로 받아들이게 하는 것이다. 따라서 '운전자의 운전 스타일에 대한 선호도 분석 기술'과 '운전 스타일'을 추론하여, 실제 시스템에 반영하기 위한 기술 위주로 개발되고 있다. 세부적으로는 '운전자 맞춤형 인터페이스', '운전자 운전행동의 모델링', '클라우드 기반 운전자 맞춤 지원 기술' 등이 개발되고 있다.
예를 들면 스마트 '크루즈 컨트롤(Cruise Control)'의 분야는 그룹 기반으로써, 미리 정해진 일반적 운전 스타일을 반영하고 운전자가 그중 하나를 선택하도록 하는 것이다. 즉 개인화 기반으로써 운전자 스스로 운전 스타일을 반영할 수 있는 주행 전략을 제공하는 것이다. 이에 따라 그룹 기반으로는 '시뮬레이터' 및 '실험에 참여한 운전자를 대상'으로 '선호하는 운전 스타일' 혹은 '타임 갭에 대한 정형화된 수식'을 도출하여 시스템에 적용하고 있다.
개인화 기반으로는 예측 모델을 적용하여, 운전자의 운전 스타일을 모방하는 운전자 운행 모델을 구축하고 있다. 그 밖에도 '타임 갭(Time Gap, 시간의 공백)', '충돌 예측 시간', '브레이크 작동 패턴' 등을 기반으로 'Linear Driver Model(선형 운전자 모델)'을 구축하여 운전자의 운행 전략을 반영하고 있다.