0. 목차
- 자율주행의 레벨
- 자율주행의 핵심 기술
- 첨단 운전자 지원 시스템(ADAS)
- 자율주행 기술의 역사
- 자율주행 기술, 상용화를 문턱에 서다.
- 자율주행 기술 시장 동향
- 자율주행 관련 각국의 정책 동향
1. '자율주행'의 레벨
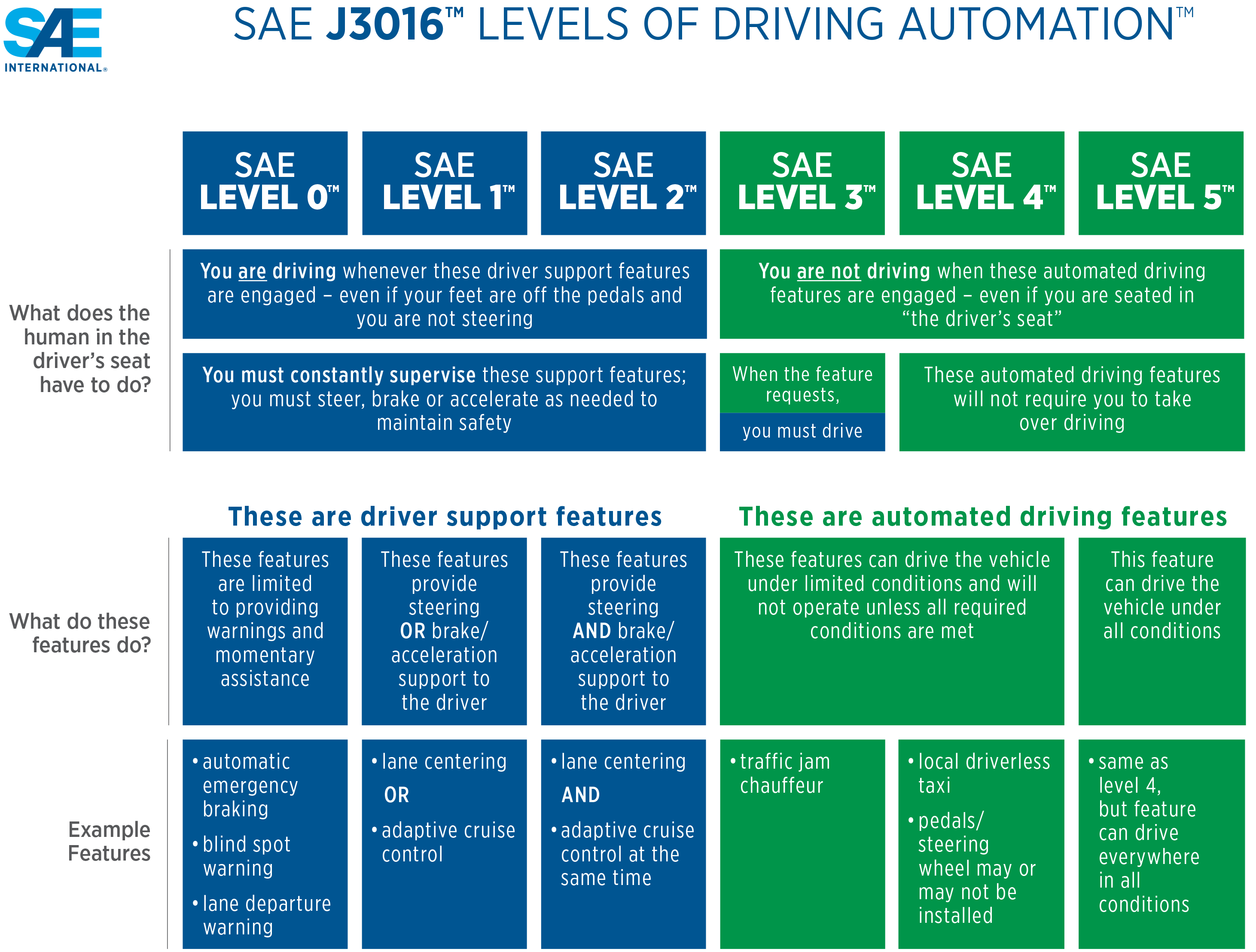
'자율주행'에는 국제적으로 널리 이용되는 자율주행의 자동화 단계가 있다. '미국 자동차 기술자 협회(SAE: Society of Automotive Engineers)'라는 비영리 단체가 2016년에 규정한 자동 운전의 '레벨(level)' 구분이다. 0단계에서 5단계까지의 레벨이 있으며, 레벨이 높을수록 자동화의 정도가 높다.
가령 사람이 어떠한 시스템의 도움도 받지 않고 핸들, 브레이크, 가속 페달을 조작하여 운전하는 자동차는 '레벨 0'이다. 즉, 레벨 1에서는 모든 환경에서 사람이 운전한다. 자율주행 레벨 1~2단계에서도 운전은 운전자가 하지만 차량이 일정 기능을 돕는다. 주행 중 차선을 벗어나려 하면, 자동차 스스로 방향을 바로잡거나 앞차와의 거리가 지나치게 가까워지려고 하면 스스로 속도를 조절해 안전거리를 유지해 준다. 예컨대 운전자가 엑셀에서 발을 떼도 일정한 속도를 유지하면 주행하는 '크루즈(Cruise)' 기능도 이 단계에 속하는 기술이다. '레벨 3'부터는 자동차가 운전의 권한을 상당히 넘겨받는다. 운전자는 심지어 자율 운행이 가능한 특정 구간에서는 핸들에서 손을 떼도 된다. 하지만 돌발 상황이 생기면, 인간 운전자가 핸들을 잡고 제어권을 넘겨받아야 한다.
'레벨 4'와 '레벨 5'에 이르면 인간의 조작이 필요 없어진다. '레벨 4'와 '레벨 5'의 차이는 '완전 자율주행'이 특정 구간에서만 가능한가, 아니면 언제 어디서나 조건 없이 가능한가이다. '레벨 4'를 '제한 조건에서의 자율주행(High Driving Automation)'이라 하고, '레벨 5'를 '무제한 조건에서의 완전 자율주행(Full Driving Automation)'이라고 부른다. '완전 자율주행차'에 탑승한 사람은 탑승하자마자 잠들어 목적지에서 깨어나도 된다. 이렇게 되면, 자동차를 고르는 기준이 어쩌면 침대를 고르는 기준과 비슷해질지도 모른다.
- 레벨 0 (자동화 없음): 모든 환경에서 사람이 운전한다.
- 레벨 1 (운전 지원): 기본적으로는 사람이 운전한다. 단 특정 조건 아래 운전대 조작이나 가속·감속의 어느 한쪽을 자동차가 실시한다.
- 레벨 2 (부분적 자동화): 역시 기본적으로는 사람이 운전한다. 단 특정 조건 아래 운전자 조작과 가속·감속의 한쪽 또는 양쪽을 자동차가 실시한다.
- 레벨 3 (조건부 자동화): 고속도로 등 한정된 환경에서 자동차가 자동으로 운전한다. 단 사람은 자동차의 요청에 따라 곧 운전에 복귀해야 한다.
- 레벨 4 (고도의 자동화): 레벨 4의 자율주행차는 특정한 조건에서의 주행에서 인간의 개입이 거의 필요 없는 단계이다. 레벨 4의 자율주행차는 고속도로 등 한정된 환경에서 자동차가 자동으로 운전한다. 자동 운전을 할 수 없는 상황이 되어도 사람은 운전에 복귀할 필요가 없다. 복귀하지 않을 때는 자동차가 자동으로 안전하게 정지 등의 조치를 취한다.
- 레벨 5 (완전한 자동화): 모든 환경에서 자동차가 자동으로 운전한다. 운전자는 필요 없다.
'자율주행차(Autonomus Driving Car)'와 비슷한 뜻으로 쓰이는 말로 '스마트카(Smart Car)'라는 말도 있다. '스마트카'는 초기 '커넥티드 카(Connected Car)'의 의미를 포함하여 자동차와 IT 기술의 융합을 목표로 등장한 개념이었다. IT 기술이 발달한 현재에는 자율주행 기능까지 포함된 광범위한 개념으로 발전하였다. '커넥티드 카'는 자동차와 자동차, 자동차와 모든 인프라 간의 양방향 통신망을 구축하는 '초연결(Hyper-connection)'을 목표로 하는 개념이다. '무인 자동차'도 이와 비슷한 개념이다.
2. 자율주행의 핵심 기술
자율주행이 가능해지려면 자동차가 인간 운전자처럼 상황을 인식할 수 있도록 다양한 센서와 고성능 카메라가 필요하다. 그리고 이를 바탕으로 인지된 영상을 통해 상황을 판단하고 대응하는 기술 또한 필요하다. 이처럼 '자율주행차'의 시스템은 '인지', 판단', '제어' 3단계를' 거쳐 동작한다. 이를 수행할 수 있는 기술이 '자율주행의 핵심 기술'이다. 그리고 자율주행차의 성능을 향상시키고 차량에 필요한 정보를 감지, 분석 관리하여 차량에 송신하는 '인프라 기술' 또한 필수이다. 이를 기능별로 구분하면 주로 다섯 가지 영역으로 구분할 수 있다. '환경 인식', '위치 인식', '판단', '제어', 'HCI(Human Computer Interaction)' 등이다.
- 환경 인식: 환경 인식 기술 영역에는 '레이더(radar)', '카메라' 등의 '센서 기술'이 포함된다. 주행 중 맞닥뜨릴 수 있는 '정적 장애물(가로물, 전봇대 등)'이나 '동적 장애물(차량, 보행자 등)'은 물론 '도로 표식(차선, 정지선, 횡단보도 등)'과 '신호'를 인식하는 기술이다. 일반적으로 인공지능 및 '디지털 트윈' 기술을 이요하여, 공간 정보를 인지하는 기술까지 포괄한다. '디지털 트윈(Digital Twin)'이란 현실 세계의 기계나 장비, 사물 등을 컴퓨터 속 가상세계에 구현한 것을 말한다.
- 위치 인식: 위치 인식 기술은 'GPS'나 'INS(Inertial Navigation System, 관성 합법 장치)', '인코더(encoder)' 등을 이용해 자율주행차의 절대적인 위치 및 상대적인 위치를 추적하는 기술이다.
- 판단: 목적지까지 이동하는 최적의 경로를 찾고, 장애물이 출현했을 때 회피 경로를 탐색하는 기술은 '판단' 기술에 속한다 언제 차선을 유지하거나 변경해야 할지, 언제 좌회전이나 우회전 또는 유턴을 할지, 앞선 차를 추월해야 할지 등을 결정하는 기술이다.
- 제어: 판단에 따라 차체를 제어할 수 있는 기능도 자율주행의 필수 기술이다. 자율주행차는 운전자가 사전에 지정한 경로대로 조향, 속도, 기어 등을 제어하고, 돌발적인 상황이 나타나도 대처할 수 있도록 '액추에이터(동력을 이동하여 기계를 동작시키는 구동 장치)'를 제어할 수 있어야 한다.
- HCI: HCI는 'HVI(Human Vehicle Interface)'를 통해 운전자에게 정보를 제공하는 인공지능 기술을 말한다. 자율주행차는 주행 중에 'V2X(Vehicle to Everything)' 통신을 통해 인프라 및 주변 차량, 보행자에게 주행 정보 및 위치 정보를 교환하는 기술을 갖추어야 한다.
2-1. 인프라 기술
자율주행차량이 안전하게 달릴 수 있도록 지원하는 '인프라 기술(infrastructure technology)'에는 'V2X(Vehicle to Everything)', '위성 측위 시스템(Global Navigation Satellite System)', '차량 통합 보안(Vehicle Integrated Security)' 등이 있다. '스마트 도로(Smart Road)'나 '노변 센서(Roadside Sensor)', '정밀도로 지도' 기술도 여기에 속한다.
- V2X(Vehicle to Everything): 'V2X'란 자율주행차가 운행하기 위해 유무선 통신망을 통해 다른 차량이나 교통망, 보행자와 정보를 교환하는 기술을 말한다.
- 위성 측위 시스템(Global Navigation Satellite System): 인공위성을 이용하여 지상물의 위치·고도·속도 등에 관한 정보를 제공하는 시스템을 말한다.
- 차량 통합 보안(Vehicle Integrated Security): 자동차에 전자제어 장치가 증가하고 통신과 연결되면서, '자동차 불법 제어' 및 '프라이버시 침해' 등 사이버 보안 취약접과 위협이 증대되고 있다. 자동차에 대한 사이버 공격 등 해킹의 피해는 최악의 경우 사망사고로 이어질 수 있으므로 자동차 사이버 보안 확보가 필수적이다.
- 스마트 도로(Smart Road): '정보통신기술(ICT: Information and Communication Technologies)'을 활용한 차세대 도로를 '스마트 도로'라고 한다.
- 노변 센서(Roadside Sensor): '노변 센서'는 위험요소를 식별하고 가능한 한 빨리 운전자에게 경고하기 위해 수시로 주변 환경을 모니터링한다.
- 정밀도로 지도: '정밀도로 지도'는 '자율주행차'의 핵심 인프라다. 터널 등 GPS 수신이 원활하지 않은 구간에서 '정밀도로 지도'에 대한 의존도는 더욱 높아진다. 이러한 수준의 정확도를 가지는 3D 지도를 구축하려면 보다 정밀한 기술이 필요하다.
3. 첨단 운전자 지원 시스템(ADAS)
2021년 기준 우리나라 65세 이상 고령 인구는 853만 7천 명으로, 2030년에는 1298만 명으로 지속적으로 증가할 전망이다. 고령 운전자에 의한 교통사고도 2016년에 8만 6304건에서 2020년에 11만 4795건으로 증가했다. 하지만 자율주행차량이 상용화되면 고령 운전자에 대한 논란이 사라질 수 있다. 더욱 안전하고 편리한 차에 대한 요구도 점차 커지고 있어서, 자율주행차에 대한 기대가 커지고 연구개발도 촉진될 수밖에 없는 상황이다.
이에 따라 자율주행차 구현을 위해 필수적인 여러 기술이 빠른 속도로 개발되고 있다. 기존의 자동차 회사는 물론, 빅 테크 기업, 스타트업들이 자율주행차에 투자하면서 각종 '센서 기술(Sensor Technology)'과 'AI 기술(AI Technology)', 5G와 같은 '통신 기술(Communication Technology)'도 급격히 발달하고 있다. 자율주행 기술 가운데 '차선 유지', '긴급 제동', '속도 유지' 등 일부 기술은 이미 '첨단 운전자 지원 시스템(ADAS: Advance Driver Assistance Sytem)'이라는 이름으로 상용화되어 널리 쓰이고 있다.
ADAS의 기능에는 '적응형 순항 제어(ACC: Adaptive Cruise Control)', '주차 조향 보조 시스템(IPAS: Intelligent Parking Assist System)', '차선이탈 경보 시스템(LDWS: Lane Departure Warning System)', '긴급상황 자동 브레이크(AEB: Autonomous Emergency Braking)', '나이트뷰(NV: Night View)', '사각지대 감지(BSD: Blind Spot Detection)', '로우·하이 빔 보조(LBA·HBA: Low·High Beam Assist)' 등이 있다.
| ADAS의 주요 기능 | 내용 |
| 적응형 순항 제어(ACC) | - 교통 환경에 따라 속도를 조절할 수 있는 기능을 가지며, 운전자의 개입 없이 자율적으로 속도를 낮추거나 높일 수 있음. 속도를 조절하는 것에서 나아가 앞선 차와 일정한 간격을 유지하며 주행하고, 정차와 재출발 기능까지 포함하는 'ASCC(Adaptive Smart Cruise Control)'가 부분 자율주행차에 장착되고 있음 - '고속도로 주행보조(HDA: Highway Driving Assist)' 시스템은 'ACC'와 유사한 기능을 갖는 운전자 보조 시스템으로, 고속도로 및 자동차 전용도로 등 특정 주행 상황을 감안하여 운전 부하를 저감하기 위해 운전자가 설정한 속도, 안전거리 및 차로 중앙을 유지하며 주행할 수 있도록 조향 및 가감속 제어가 가능한 시스템임 |
| 주차 조향 보조 시스템(IPAS) | - 차량 스스로 주차 위치를 탐색하고 조향하는 기능을 가지며, 운전자의 변속기·페달 구동만으로 주차를 가능하게 함. - '스마트 주차 보조 시스템(SPAS: Smart Parking Assist System)'은 여러 센서를 통해 주변의 장애물을 감지하고 자동으로 차량의 스티어링 휠을 조작하여 주기 때문에 운전자는 음성 신호에 따라 브레이크만 조작하면 주차가 완료됨 |
| 차선이탈 경보 시스템(LDWS) | - 운전자 부주의로 주행 차선 이탈 시 운전자에게 경고 메시지 및 차선 교정 역할을 함. - 초기 시스템은 핸들의 진동 혹은 경고음 등의 차선이탈 경고 기능 중심이었으나, 최근의 시스템은 핸들을 직접 조향하는 차선 유지 및 복귀 기능인 '주행 조향 보조 시스템(LKAS: Lane Keeping Assist System)'을 포함함 |
| 긴급상황 자동 브레이크(AEB) | - 차량의 충돌 및 보행자 사고 발생이 예상되면 브레이크를 직접 작동하여 사고를 예방하는 기능을 가짐 |
| 나이트뷰(NV) | - 야간 운전 시 시인성을 높이기 위해 영상을 통하여 전방 장애물을 스스로 감지하는 기능을 가지며, 보다 안전한 야간 운행을 가능하게 하는 기술임. - 현재의 야간 시야 확보 시스템이 도로 앞을 더 밝게 비춰주거나 혹은 사람의 눈으로는 볼 수 없는 곳의 차량·보행자·장애물 등을 탐지하여 경고한다면 '충돌 방지 시스템(CAS: Collision Avoidance System)'과 통합되어 운전자가 미처 대응하지 못하더라도 자동을 탐지·회피하는 방향으로 발전할 것임. |
| 사각지대 감지(BSD) | - 운전자가 확인하지 못하는 사각지대를 감지하여 운전자에게 인지하는 장치로 후방 경보 시스템을 이용하여 사각지대의 차량 및 장애물을 감지·경고하는 기술임 - 사각지대 경보장치(Blind Spot Assist), 차선 변경 지원 시스템(Lane Change Assist), 후측방 충돌 방지 시스템(Active Blind Spot Detection), 후방 교차 충돌 방지 시스템(Rear Cross-Traffic Collision-Avoidance Assist) 등이 있음 |
| 로우·하이 빔 보조(LBA·HBA) | - 야간 및 저조도 환경에서 전방 가시거리를 확보하기 위해 차량의 추가 램프 작동 여부와 하향등 방향을 제어하며, 눈부심을 최소화하면서 전방 가시거리를 최대한 확보하기 위해 하이빔 작동 여부를 제어하는 시스템을 말함 |
4. 자율주행 기술의 역사
4-1. 스스로 달리는 차를 꿈꾸다.
1926년 미국 뉴욕 브로드웨이에는 운전석에 사람이 없는 자동차가 길거리를 돌아다녔다. 사람들은 '유령 자동차'라고 혼비백산했지만, 사실 그것은 전기 엔지니어였던 '프랜시스 후디나(Francis Houdina)'가 전파 송신기'를 설치한 차량으로, 뒤따라가는 차에서 무선 신호를 보내서 운전을 한 것이었다. '아메리칸 원더(American Wonder)'라고 이름 붙여진 이 시연은 사실 자율운행차라기보다는 아이들의 RC카 장난감을 크게 만들어 보여준 쇼와 같은 것이었다.
4-2. 초기 자율주행의 아이디어는 자동차보다 도로에 초점이 맞춰졌다.
1930년대에는 오늘날과 유사한 콘셉트의 '자율주행차(self-driving car)'를 상상한 사람이 나타났다. 그는 바로 미국의 산업디자이너 '노먼 벨 게디스(Norman Bel Geddes, 1893~1958)'였다. 그는 1939년 뉴욕 세계 박람회에서 자동차 회사 '제너럴 모터스(GM)'의 전시관을 디자인하면서 '퓨처라마(Futurama)'라는 미래 도시 모형을 공개했다. '퓨처라마'는 관람자가 움직이는 의자를 타고 근미래인 1960년대를 표현한 모형 도시를 관람하도록 되어 있었다. '퓨처라마' 속 미래 자동차는 '전자기장(Electromagnetic field)'으로 유도되는 도로 위를 무인으로 달렸다. 일종의 '자동화 고속도로(Automated Highway)'를 구상한 것이다. 이처럼 자율주행차에 대한 초기 아이디어는 자동차보다 도로에 초점이 맞춰졌다.
4-3. 전자 제어 고속도로 건설 계획을 세웠었다.
1953년에는 'RCA 연구소'가 '노먼 벨 게디스'의 아이디어를 현실화했다. 'RCA 연구소'는 실험실 바닥에 놓인 전선을 따라 달리고 제어되는 자동차 시스템을 만들었고, 4년 뒤에는 네브라스카주에 있는 실제 고속도로에서 성공적으로 시연했다. 도로 속에는 전자기선 회로가 매설되어 있었다. 1958년에 RCA는 GM과 도로에 박힌 전자기선을 따라 움직이는 '자석달린 자동차'를 개발하기도 했다.
도로를 개량해 무인으로 달리는 자동차를 만들려는 시도는 1960년대에도 계속되었다. 자동차 회사 '쉐보레(Chevrolet)'와 '시트로엥(Citroen)'이 도로에 깔린 전자기선을 따라 달리는 자동차를 만들었다. 미국 오하이오 주립대학에서는 '도로 시스템'과 '전자 신호'를 주고받으며 무인으로 달리는 자동차를 개발했다. 미국 도로국은 오하이오주와 메사추세츠 주, 뉴욕주, 캘리포니아주에 전자 제어 고속도로를 건설할 계획을 세우기도 했다.
1977년 일본의 츠쿠바 대학의 기계공학 연구소에서는 바닥에 그려진 흰색 선을 따라 스스로 주행하는 자동차를 개발했다. 최대 시속이 30km밖에 안되는 느린 속도였지만, 컴퓨터 시스템을 이용하는 자율주행 기술 연구의 근간을 마련했다는 평가를 받았다.
4-4. 컴퓨터의 발달과 함께 급진전하다.
1980년대가 되자 비로소 도로를 개량하기보다 자동차를 개량하자는 움직임이 본격적으로 나오기 시작했다. 컴퓨터 기술이 발달하면서 마이크로프로세서의 크기가 작아지고 강력해지자, 컴퓨터의 '지능'을 탑재할 수 있게 되었기 때문이다. 1980년대 초 독일 '뭔헨 연방 대학(Bundeswehr University Munich)'의 '에른스트 딕만(Emst Dieter Dickmanns)' 교수는 '메르세데스 벤츠'의 밴에 카메라와 센서를 달아 인식한 이미지를 바탕으로, 컴퓨터로 운전대와 '스로틀(Throttle)'과 '브레이크(Break)'를 제어하는데 성공하였다. '에른스트 딕만' 교수는 차에 '바모스(VaMoRs)'라는 이름을 붙였고, 도시의 도로에서 교통 신호를 지키면서 스스로 달리도록 했다. '바모스'는 1986년에 평균 시속 63km, 1987년에는 시속 96km로 주행할 수 있었다.
4-4-1. 프로메테우스 프로젝트
이후 '에른스트 딕만' 교수는 유럽의회가 7억 4900만 유로라는 막대한 자금을 지원하는 미래 자동차 연구프로젝트인 '유럽 첨단 기술 공동 연구계획(EUREKA)'의 '프로메테우스 프로젝트(Prometheus Project)'를 이끌었다. '프로메테우스 프로젝트'는 1987년부터 1995년까지 계속되었으며, 유럽의 주요 국가와 주요 자동차 브랜드가 대거 참여한 사상 최대의 프로젝트였다.
'에른스트 딕만' 교수는 '프로메테우스 프로젝트'를 통해 높은 성과를 거두었다. 벤츠 500SEL을 개조한 '벰프(VaMP)'와 '비타2(VITA-2)'로 1994년 파리 샤를 드골 공항 근처 3차선 도로 1000km를 시속 130km로 주파하고, 1년 후에는 뭔헨부터 코펜하겐까지 1758km 구간을 주행했다. 주행 중의 차선 변경과 차간 거리 유지는 차량 시스템이 맡았다. 독일 아우토반에서는 9km마다 운전자가 개입을 하는 조건에서 시속 175km로, 95% 자율주행을 했다고 발표해 세계를 놀라게 했다.
4-4-2. 아르고 프로젝트
이탈리아에서는 '아르고 프로젝트(ARGO Project)'가 진행되었다. 파르마 대학의 '알베르토 브로기(Alberto Broggi, 1966~)' 교수는 '란치아(Lancia)'사에서 생산된 세단 '테마(Thema)'를 자율주행차로 개조하여, '테스트베드(Test Bed)'에서 94% 자율 모드 주행에 성공하였다. 1996년에는 일반 고속도로 주행에도 나섰다. '알베르토 브로기' 교수팀의 자동차는 흑백 비디오카메라 2대로 습득한 정보를 입체 영상으로 처리하는 방법으로, 시속 90km의 평균 속도로 일반 고속도로에서 6일 동안 1900km를 자율주행하는 데 성공하였다.
4-4-3. 미국 카네기 멜론 대학의 자율주행 연구
1984년, 미국에서는 '카네기 멜론 대학(Carnegie Mellon University)'의 내비게이션 연구소에서 자율주행 연구를 시작했다. 연구소는 1986년 '쉐보레 밴'을 개조해서 만든 '내브랩(Nav Lab1)'은 시속 30km 정도의 자율주행을 할 수 있었다. 1995년에는 'No Hand Across America' 프로젝트를 시작하여 피츠버그에서 샌디에이고까지 총 4585km 거리 중 98.2%를 자율주행하는 데 성공했다. '내브랩1'은 '신경망(Neural Network)'로 조향을 제어했지만, 안전상의 이유로 가속과 제동은 운전자가 맡아 절반의 성공을 거두었다고 평가받는다.
'내브랩'은 미국 국방 고등 연구 계획국(DARPA: Defense Advanced Research Projects Agency)'이 추진한 '자율 육상 주행 차량(ALV: Autonomous Land Vehicle)' 프로젝트의 지원을 받았다. ALV는 군 장비를 무인화하겠다는 목표로 계획된 프로젝트였다. 덕분에 자율주행 주요 기술인 '라이다(LiDar)', '컴퓨터 시각(Computer Vision), '자율로봇 제어(Autonomous robot control)' 등의 기술이 크게 발전했다. ALV 프로젝트는 카네기 멜론 대학뿐 아니라 메릴랜드 대학교, 미시간 환경 연구소, '마틴 마리에타(Martin Marietta)' 및 SRI International 등에서 추진되었다.
1997년 미국에서는 대규모 자율주행차 주행 시연이 벌어졌다. 1991년부터 '미국 교통부(D.O.T: Department of Transportation)'가 주도하여 개발해온 자율주행 자동차와 고속도로 체계를 선보이는 자리였다. 이 프로젝트에는 '제너럴모터스', '델코', '록히드 마틴' 등 여러 기업이 참여했다. '데모 97'이라는 이름의 이 시연에는 가족 자율주행차 20대가 참가해 수천 명의 관람객 앞에서 자율주행차의 가능성을 보여주었다. 하지만 1990년대 후반에 미국 교통부의 예산이 빠듯해지면서, 사용화를 위한 시스템 설계를 앞두고 취소되었다. 이때까지 투입된 자금은 총 9000만 달러였다.
4-4-4. 고려대학교 한민홍 교수의 자율주행 연구
1993년에는 대한민국 고려대학교의 한민홍 교수도 자율주행차를 연구하기 시작했다. 한민홍 교수는 '아시아자동차(Asia Motors)'의 자동차 '록스타(ROCSTA)'를 자율주행차로 개조하였다. 1995년에는 다른 차량을 이용해 서울에서 부산까지 경부고속도로를 달렸다. 또 1998년에는 마티즈를 개량한 'KAV-5'를 선보였고, 2000년에는 고려대 교내 벤처로 '첨단차'를 설립하는 등 자율운행 기술을 지속적으로 연구개발하였다.
4-5. DARPA 그랜드 챌린지
'DARPA(미국 국방 고등 연구계획국)'은 2000년대에 자율운행 기술 발전을 위한 도약의 발판을 마련했다. 세계 최초의 장거리 무인 자율주행 자동차 대회인 'DARPA 그랜드 챌린지(DARPA Grand Challenge)'를 개최한 것이다.
- 2004년 첫 번째 대회: 2004년 3월에 열린 첫 대회의 미션은 '모하비(mohave)' 사막 지역에서 240km 코스를 10시간 이내에 완주하는 것이었다. 하지만 아무도 시간 내 완주를 하지 못해, 상금 100만 달러의 주인공은 나오지 못했다. 가장 멀리 간 차가 겨운 12km를 나아갔다.
- 2005년 두 번째 대회: 2005년에 열린 두 번째 대회의 상금은 두 배로 올랐다. 이 대회에 출전한 23개 팀 중에서 5팀이 완주했는데, 우승자는 6시간 54분의 기록을 세운 '스탠리(Stanley)'팀이었다. '스탠리'는 '스탠포드 대학'과 '폭스바겐' 등의 연합팀이었다. 팀 리더는 당시 '스탠포드 AI 연구소(Stanford AI Lab)'의 이사였던 '세바스찬 스런(Sebastian Thrun)'으로, 그는 후에 구글의 자율주행 회사인 '구글 X(Google X)'를 공동 설립했다. 구글은 2008년부터 자율주행차 개발을 시작했지만, 과정은 공개하지 않았다.
- 2007년 세 번째 대회: 2007년에는 세 번째이자 마지막인 'DARPA 그랜드 챌린지'가 열렸다. 대회가 열린 장소는 로스앤젤레스에서 북동쪽으로 120km 떨어진 폐쇄된 공군기지였다. '어반 챌린지(Urban Challenge)'라는 이름으로 진행된 대회는 무인자동차가 도시 환경에서 얼마나 잘 달릴 수 있는지를 보기 위한 것이었다. 본선에 오른 11개 참가팀은 모형 도시 환경에서 주변 차량을 피하고, 좌회전을 하고, 교차로를 지나고, 2차선 도로에서 마주 오는 차량과 충돌하지 않고, 적절한 간격을 유지하면서 목적지까지 도착했다. 우승자는 '쉐보레'의 '타호(Tahoe)' 기종을 개조해 '보스(Boss)'라는 이름을 붙인 '카네기 멜로 대학'과 'GM'의 연합팀이었다. '보스(Boss)'의 기록은 4시간 10분, 평균 시속은 22km였다.
2005년 대회에서 또 기억할 만한 것은 오디오 회사였던 '벨로다인(Velodyne)'사의 CEO '데이비드 홀(David Hall)'이 프로토타입의 '라이다(LiDAR)' 센서로 대회에 참가했다는 점이다. 그 후 라이다는 재빠르게 자율주행차량의 필수 센서처럼 되었다. 2007년 DARPA 대회를 완주한 6대의 차량 중 5대가 벨로다인의 제품을 사용했을 정도였다.
5. 자율주행 기술, 상용화 문턱에 서다.
자율주행차는 2000년대에 들어서 놀라운 기술 진전을 보였으며, 2010년대부터는 이를 바탕으로 상용화 단계를 밟기 시작했다. 다임러, BMW, 아우디, 폭스바겐, 제너럴 모터스, 도요타 등 기존의 완성차 업체는 물론이고 보쉬, 델파이, 콘티넨탈 같은 부품 공급업체, 우버 같은 차량 공유 회사, 바이두 같은 IT 기업, 엔비디아나 인텔 등 반도체 제조회사, '죽스(Zoox)', '크루즈 오토메이션(Cruise Automation)', 누토노미, 나브야 등의 스타트업도 기술 개발과 사용화에 뜰어들었다. 이들 기업은 합종연횡으로 서로 제휴하면서 기술 개발과 상용화에 나섰다.
- 미국: 현재 자율주행차 기술의 맨 앞에는 미국의 기업들이 자리하고 있다.
- 유럽: 전통 자동차 산업의 강자인 유럽의 완성차 업체들도 자율주행차량 개발에 열심이다. 이 회사들은 '첨단 운전자 보조 시스템(Advanced Driver Assistance System)'이라는 이름으로, 자사의 상용차에 자율주행 기술을 점진적으로 업그레이드하며 탑재하여 출시하고 있다.
- 일본: 2021 도쿄 올림픽에서 자율주행 셔틀 '아팔레트(e-Palette)'를 선보였다가 패럴림픽 선수와 충돌 사고가 나는 바람에 체면을 구기긴 했지만, 일본도 여전히 자율주행 기술을 개발에 열심이다. 주요 완성차 업체인 '도요타(Toyota)'와 '닛산(Nissan), 그리고 혼다는 자율주행 자동차 시장 선점을 위해 적극적으로 투자하고 있다.
- 한국: 한국의 자율주행 기술은 2010년부터 현대기아자동차가 실시하는 무인 자율주행 자동차 경진대회를 발판으로 연구가 점점 확대되고 있다. 2022년 현재는 여러 산·학·연에서 자율주행 레벨 3~레벨 4의 자율주행 시스템을 개발하고 있다.
5-1. 웨이모
- 국적: 미국
'구글(Google)'의 '웨이모(Waymo)'는 2008년부터 비밀리에 자율주행 기술 개발을 시작했고, 2년 후에 자율주행차 개발 프로그램을 공식 발표했다. 2012년에는 실제 도로주행 시험을 위한 세계 최초의 자율주행 면허를 취득했다. 2014년에는 핸들과 브레이크가 없는 프로토타입의 '구글카(Google Car)'를 선보였고, 2016년에는 자율주행차 부문을 '웨이모'로 분사했다. 2016년 말 기준 웨이모는 총 55대의 자율주행 자동차를 확보하였다. 웨이모는 2018년 애리조나주 피닉스에서, 2019년에는 캘리포니아 샌프란시스코에서 '로보택시(자율주행 택시)' 시범 서비스인 '웨이모원(WaymoOne)'을 시작했다. 애플리케이션을 통해 호출할 수 있는 웨이모원에서는 샌프란시스코엔 안전요원이 탑승하고 있지만 피닉스에는 승객만 탑승한다. 웨이모는 2021년에 미국의 물류기업 'UPS'와 텍사스 지역에서 레벨 4 수준의 대형 트레일러 자율주행 트럭 '웨이모비아(Waymo Via)'의 시범 운행을 실시했다.

5-2. 테슬라
- 국적: 미국
'테슬라(Tesla)'는 2012년부터 자체 자율주행 시스템을 개발했다. 테슬라 자율주행 시스템의 특징은 카메라로 수집한 방대한 영상 데이터를 '기계학습(Machine Learning)'을 통해 처리하는 방식이다. 테슬라는 2014년부터 자사의 자동차에 자율주행 시스템 '오토파일럿(Autopilot)'을 제공했고, 반자율주 기능부터 점점 업그레이드된 소프트웨어를 제공하여, 2016년 무렵에는 레벨 2 수준의 자율주행이 가능하도록 했다. 테슬라는 2014년부터 오토파일럿 모드 주행이 30억 마일을 넘어섰다고 발표했다. 테슬라 오토파일럿은 2021년부터 레벨 3 수준의 자율주행기능을 제공하고 있다.

5-3.제너럴모터스
- 국적: 미국
'제너럴모터스(GM: General Motors)'는 2016년 자율주행 시스템 개발 스타트업인 '크루즈 오토메이션(Cruise Automation)'을 인수하면서 본격적으로 자율주행차 개발에 뛰어들었다. 2018년에는 자사의 쉐보레 '볼트이브이(Bolt EV)'를 기반으로 개발한 자율주행차 '크루즈AV(CruiseAV)'의 이미지를 발표하기도 했다. '크루즈AV'는 운전대나 브레이크 대신 좌석, 문, 디스플레이아 위급 상황에서 차를 세울 수 있는 비상 정지 버튼만 있다. 2020년 초에는 여기서 더 나아간 '크루즈 오리진(Cruise Origin)'을 공개하였다. 레벨 5 수준의 자율주행 콘셉트카 크루즈 오리진은 차체 곳곳의 카메라와 레이더 센서로 주변 차량과 사람, 도로 모양을 인식해 주행한다. 실내에는 운전석 대신 서로 마주 볼 수 있는 시트가 탑재되었다.

5-4. 인텔(Intel)
- 국적: 미국
'인텔(Intel)'은 2017년에 이스라엘의 자율주행 스타트업 '모빌아이(Mobileye)'를 인수하고 자율주행차 개발을 하고 있다. 모빌아이는 당초 라이다 기반의 자율주행 기술 개발을 추진했으나 라이다 레이더 복합 기술 개발로 선회했다. 인텔은 2021년 7월부터 모빌아이 기술로 만든 '로보택시(자율주행 택시)'를 복잡한 뉴욕 공공도로에서 실증하였고, 2022년부터 독일 뮌헨과 이스라엘 텔아비브에서 운행할 예정이다.
5-5. 포드(Ford)
- 국적: 미국
'포드(Ford)'는 차량 공유 기업 '리프트(Lyft)', '아르고 AI(Argo AI)'와 협력해 자율주행차 개발을 진행 중이며, 2022년 자율주행차 상용서비스 운행을 목표로 하고 있다. 포드는 2019년 레벨 4 수준의 자율주행 시스템이 적용된 '이스케이프 하이브리드(Escape Hybrid)' 모델을 공개하기도 했다. 2021년에는 월마트와 협업하여 플로리다주 마이애미, 텍사스주 오스틴, 워싱턴 DC 등에서 자율주행차량 물품 배송 서비스를 시행하기도 했다.
5-6. 아마존(Amazon)
- 국적: 미국
'아마존(Amazon)'은 2020년 자율주행차 스타트업 '죽스(Zoox)'를 인수하고, 자율주행 4단계 수준의 자율주행 로보택시를 공개하였다. 아마존이 공개한 자동차는 양바향으로 달릴 수 있으며, 운전대를 제거하고 4인승 대면좌석을 만든 것이 특징이다. 이 차량은 앞으로 단거리 배송에도 활용될 것으로 보인다.
5-7. 애플(Apple)
- 국적: 미국
'애플(Apple)'은 2014년부터 '애플카(Apple Car)'로 불리는 자율주행차 개발 계획인 '프로젝트 타이탄(Project Titan)'을 추진 중이다. 세계 1위 파운드리 업체이자, 애플 칩 공급업체인 TSMC와 자율주행 칩을 개발 중인 것으로 알려졌으며, 2025년 완전 자율주행차를 출시하겠다는 계획을 발표했다.

5-8. 엔비디아(NVIDIA)
- 국적: 미국
'GPU(Graphic Processing Unit)' 개발 업체인 '엔비디아(NVIDIA)'도 자율주행차 시스템 개발에 나섰다. 레이더와 라이더, 카메라, 센서 등을 이용해 수집한 정보를 동시에 빠르게 처리해야 하는 자율주행차에는 GPU가 필수적이다. 엔비디아는 2015년부터 플랫폼 엔비디아 드라이브(NVIDIA Drive)'를 활용해 기술 개발을 추진 중이다. '엔비디아'는 AI 컴퓨팅 기술을 토대로 '볼보(Volvo)', '도요타(Toyota)', '다임러(Daimler)', '메르세데스 벤츠(Mercedes-Benz)', '상하이 자동차(SAIC Motor)'등 여러 완성차 업체들과 협력해 나가고 있다.

5-9. 오로라 이노베이션(Aurora Innovation)
- 국적: 미국
2017년 '구글(Google)', '테슬라(Tesla)', '우버(Uber)' 출신의 엔지니어가 2017년에 창업한 자율주행 기술 스타트업 '오로라 이노베이션(Aurora Innovation)'은 자율주행 플랫폼 '오로라 드라이버(Aurora Driver)'를 개발 중이다. 2019년, '아마존(Amazon)', '현대자동차그룹' 등의 기업으로부터 5억 3000만 달러 규모의 투자를 유치해서 화제가 되었다. '오로라 이노베이션'은 2021년 3월에는 '볼보 그룹'과, 9월에는 글로벌 물류 회사 '페덱스(FedEx)'와 제휴를 맺고 배송용 무인 트럭을 개발 중이다. '오로라 이노베이션'은 향후 구독형 자율주행 트럭 서비스 '오로라 호라이즌(Aurora Horizon)'과 무인 차량 호출 사업 '오로라 커넥트(Aurora Connect)'도 벌여나가겠다고 밝혔다. 아래의 사진은 '오로라 이노베이션'의 '오로라 드라이버(Aurora Driver)'가 탑재된 트럭과 승용차이다.

5-10. 코디악 로보틱스(Kodiak Robotics)
- 국적: 미국
2021년, 미국 실리콘밸리의 자율주행 트럭 회사 '코디악 로보틱스(Kodiak Robotics)'의 자율주행 시스템은 장거리 화물 운송을 위해 특별 제작되었다. '코디악 로보틱스'는 2021년 10월에 자율주행을 트럭을 공개하였다. 4세대 자율주행 플랫폼에 활용된 인식시스템 '코디악 비전(Kodiak Vision)'은 라이다, 카메라, 레이더 등 모든 센서를 우선적으로 고려하는 독특한 접근법을 채택하였다고 한다. 이같은 접근법을 통해 자율주행 시스템에 또 다른 '안전층(layer of safety)'을 추가했다는 것이다./p>
5-11. 다임러-벤츠
- 국적: 독일
2012년 '다임러(Daimler)'와 '카를스루에 기술연구소(Karlsruhe Institute of Technology)'는 '베르타(Bertha)'라는 자율주행 연구용 자동차를 공동 개발했다. 2013년에는 '인텔리전트 드라이브(Intelligent Drive)'라는 이름의 '운전자 보조 시스템'을 적용한 '벤츠 S 클래스(Benz S-Class)'를 처음 선보였다. 벤츠는 출시 직전 '인텔리전트 드라이브'를 장착한 S 클래스로 1888년에 '베르타 벤츠'가 처음으로 장거리 자동차 여행을 나섰던 발자취를 따라, '만하임(Mannheim)'에서 '포르츠하임(Pforzheim)'까지 100km에 이르는 구간을 주행에 성공했다.
이후 벤츠는 2014년 미국 캘리포니아주 공공도로에서 자율주행차량 시험에 대한 공식 허가를 받아, 이 분야 최초의 자동차 제조사가 되었다. 또 'CES 2015'에서는 콘셉트카 'F015'를 공개하기도 했다. 2015년 9월에는 '악트로스 1845(Actros 1845)'를 기반으로 한 세계 최초의 자율주행 트럭 '퓨처 트럭 2025(Future Truck 2025)'를 선보였다. 2021년 출시한 '더 뉴 EQS'에서는 레벨 3 수준의 자율주행을 구현하는 '드라이브 파일럿(Drive Piot)'이 탑재되었다.

5-11. 아우디(Audi)
- 국적: 독일
'아우디(Audi)'는 2017년에 자율주행 3단계 상용화에 성공하였다. 아우디는 자율주행차에 '레이저 센서(Laser Sensor)', '전면부 카메라', '초음파 센서(ultrasonic camera)'외에 '라이다(LiDar)'를 최초로 도입한 자동차 제조업체이다. '라이다(LiDar)'는 전통적 '레이다(Radar)'와 원리 측면에서는 동일하지만, 사용하는 전자기파 파장이 다르기 때문에 실제 적용 분야와 이용 기술에서 차이가 있다.
5-12. 폭스바겐(Volkswagen)
- 국적: 독일
'폭스바겐(Volkswagen)'은 2019년 '포드(Ford)'와 함께 '아르고 AI 자율주행' 기술에 공동투자하기로 발표하고, 자율주행 미니밴의 프로토타입을 공개했다. 이 자동차는 레이더 11개에 라이다 6개, 카메라 14개를 탑재했으며, 지붕에는 고성능 라이다를 통해 400m 전방 물체를 감지하는 '가이거 모드 기술(Geiger-mode technology)'을 적용하였다. 2021년에는 독일 함부르크 일대에서, 자율주행 레벨 4 기술을 탑재한 미니밴 ID·버즈의 주행테스트를 실시했다. 폭스바겐은 2025년까지 자율주행차를 출시하겠다고 밝힌 바 있다.
5-13. 시티모빌2(Citymobil2)
유럽에서는 일찍이 공공 교통수단으로서의 자율주행 셔틀 개발연구가 활발했다. 가장 대표적인 것이 '유럽연합(EU)'의 공동연구 실험 주행 프로젝트인 '시티모빌2(Citymobil2)'이다. 이 프로젝트로 2015년부터 유럽 11개 지역에 자율주행 셔틀버스가 운행되었고, 4년간 6만 명 이승이 탑승했으며, 이 가운데 4곳은 영구적으로 운영하기로 결정했다.
5-14. 파불로스 프로젝트
'파불로스 프로젝트(FABULOS Project)'도 진행 중이다. 이 프로젝트는 '유럽연합(EU)' 집행위원회 산하기관 연국 총국에서 주최하는 '호라이즌 2020(Horizon 2020)' 연구 및 혁신 프로그램으로부터 자금을 지원받았다. '파불로스 프로젝트'는 핀란드 헬싱키, 노르웨이 예스달, 에스토이니 탈린 등 유럽 5개 도시에서 실증 실험을 진행한 바 있다.
5-15. 도요타(Toyota)
- 국적: 일본
'도요타(Toyota)'는 세계에서 자율주행 기술 특허를 가장 많이 보유한 회사이다. 도요타는 'CES 2017'에 '콘셉트 애아이(Concept-愛i)'라는 운전자의 감정, 인식, 기호 등을 파악해 주행에 반영하는 자율주행 시스템 콘셉트 자동차를 발표한 바 있다.
'도요타'는 자회사 '우븐 플래닛(Woven Planet)'을 통해 2021년 4월 미국 차량 공유 업체 '리프트(Lyft)'의 자율주행 사업 부문을 인수했다. 또 같은 해 2월 후지산기슭 폐공장 터에 수소 에너지와 태양광, 자율주행, 인공지능 기술 등을 연계한 스마트 도시인 '우븐 시티'를 착공했다.

5-16. 혼다(Honda)
- 국적: 일본
'혼다(Honda)'는 2021년 4월 세계에서 처음으로 레벨 3 자율주행 자동차를 판매하기 시작했다. 혼다의 고급 승용차에는 레벨 3 자유주행 시스템인 '혼다 센싱 엘리트(Honda Sensing Elite)'가 탑재되어 판매된다. '혼다 센싱 엘리트'는 고속도로에서 정체 등으로 시속 30~50km로 주행할 때 운전자 대신 시스템이 스스로 운전하다가 시속 50km가 넘어가면 운전자에게 다시 제어권을 넘기도록 되어 있다.
5-17. 닛산(Nissan)
- 국적: 일본
'닛산(Nissan)'은 2016년에 자율주행 시스템인 '프로파일럿(ProPILOT)'을 처음 공개한 후, 2017년 유럽에서 도로주행 실험을 완료하고 자사의 차량에 탑재하여 판매하기 시작했다. 현재 '프로파일럿'은 레벨2 이상의 자율주행 기술을 구현한다.
5-18. 바이두(Baidu)
- 국적: 중국
중국의 IT 기업 '바이두(Baidu)'는 '로보택시(자율주행 택시)' 분야의 강자다. 바이두는 지난 2017년 자율주행차 플랫폼 '아폴로(Apollo)'를 발표한 이후 꾸준히 발전시켜왔다. 2019년 초에는 복잡한 도시에서 자율주행이 가능한 3.5 버전과 자율주행 시스템 양산을 목적으로 한 종합 솔루션 '아폴로 엔터프라이즈(Apollo Enterprise)'를 출시하였다.
바이두는 2019년 후난선 창사시에서 무인택시 '아폴로 고(Apollo Go)' 서비스를 시작하였다. 현재 '아폴로 고'는 창사시는 물론이고 베이징, 상하이, 광저우, 허베이성 장저우 등 5개 도시에서 운행 중이다. 바이두는 '아폴로 고' 서비스를 2025년까지 65개 도시, 2030년에는 100개 도시로 확장하겠다고 밝혔다. 바이두는 2023년 양산하겠다는 목표로 대형 트럭 콘셉트카 '싱투(Xing Tu)' 1세대도 선보였다.

5-19. 포니닷에이아이(Pony.ai)
- 국적: 중국
'포니닷에이아이(Pony.ai)'는 중국에 최초로 자율주행 택시를 도입한 기업이다. 실리콘밸리에 본사를 두고 있는 포니닷에이아이는 2018년 광저우에 인공지능 연구 센터를 설립하고, 자율주행 택시 파일럿 서비스를 시작했다. 2019년 말에는 캘리포니아에서도 서비스를 시작했고, 현재 일본 도요타와 협력하여 자율주행차 개발 및 보금에 나서고 있으며, 2022년까지 완전 자율주행 택시를 출시하는 것이 목표다.
5-20. 투심플(TuSimple)
- 국적: 중국
'투심플(TuSimple)'은 중국 최대의 자율주행 트럭 개랍 업체이다. 미국 샌디에이고에도 기반을 두고 있는 투심플은 2019년부터 미국의 물류기업 UPS와 손잡고 애리조나 피닉스시와 댈러스시에서 배송 테스트에 나섰다. 투심플은 2021년에 자율주행 트럭 시범 주행을 마치고, 2023년에는 첫 자율주행 트럭 출시 및 공유 서비스를 제공할 예정이라고 한다. 또 2024년에는 미국 48개 주를 연결하는 네트워크를 완성하겠다고 밝혔다.
'투심플(TuSimple)'은 2021년 4월 나스닥에 주당 40달러에 'IPO(기업공개)'를 했다.
5-21. 알리바바(Alibaba)
- 국적: 중국
중국 최대 전자상거래 기업인 '알리바바(Alibaba)'도 2021년 자체 개발한 자율 운행 트럭 '다만뤼'의 시험 운행을 시작했다. 2024년 1만 대 이상의 무인트럭을 상용화하는 것이 목표라고 한다.
5-21. 현대자동차
- 국적: 한국
현대자동차는 2010년 '투싼ix 자율주행차'를 데모카 형태로 선보이며 국내에 본격적인 자율주행차 개발 시대를 열었다. 이후 2015년 미국 네바다주에서 투싼 수소전기차에 대해 고속도로에서 자율주행시험을 할 수 있는 운행 면허를 취득했다. 그리고 2017년 1월에는 미국 '라스베이거스(CES 2017)에서 아이오닉 자율주행차로 야간 주행에도 성공했다.
현대 자동차는 매년 자율주행 자동차 기술 순위를 발표하는 '네비건트 리서치(Navigant Research)'의 2019년 보고서에서 6위에 올랐다. 모빌리티 전문 기업 '앱티브(Aptiv)'와 협력하게 된 덕분이다. '앱티브(Aptiv)'는 아일랜드 더블린에 본사를 둔 글로벌 탑티어 자동차 부품회사이다. 현대자동차는 2019년 앱티브와의 합작법인 '모셔널(Motional)'을 설립하고, 2023년까지 미국 차량 공유 서비스 업체 '리프트(Lyft)'와 함께 '아이오닉 5(ionic 5)'를 기반으로 한 로보택시를 상용화하기로 했다. 2022년 6월 10일부터는 서울에서 '아이오닉5'에 레벨 4 자율주행 시스템을 적용한 시범 서비스인 '로보라이드(RoboRide)' 실정에 들어갔다. 로보라이드 시범서비스 시범 서비스가 이뤄지는 서울 강남은 교통 상황이 가장 혼잡한 곳으로 꼽히는 왕복 14차로의 영동대로, 왕복 10차로의 테헤란로와 강남대로를 포함한다. 버스와 트럭부터 승용차 및 오토바이까지 다양한 교통수단이 혼재되어 사람이 운전할 때도 많은 주의가 요구되는 곳이다.
5-22. 삼성전자
- 국적: 한국
삼성전자는 2019년 자동차전장, 자율주행 AI 연구개발에 향후 3년간 25조 원을 투자하겠다고 밝힌 바 있다. 2025년까지 완전 자율주행 시스템을 개발하겠다는 목표다. 2021년 11월에는 세계 최초로 5G를 지원하는 반도체를 비롯한 차량용 반도체 3종을 개발하여 공개했다. 이 중 인포테인먼트용 프로세서는 폭스바겐에 탑재될 예정이다.
5-23. LG전자
- 국적: 한국
'인포테인먼트(Infortainment)'는 '정보(Information)'와 '오락(Entertainment)'의 합성어로, 정보의 전달에 오락성을 가미한 소프트웨어 또는 미디어를 가리키는 용어이다. 'LG전자'는 차량용 전장부품을 다각화하고 '인포테인먼트(Infotainment)' 부분을 차세대 성장 동력으로 삼기로 했다. 이를 위해 해외 완성차 기업과 공동연구개발에 한창이며, 구글(Google)', '보쉬(Bosch)'와 제휴 관계를 맺고 있다. '애플(Apple)'이 완전 자율주행차를 출시할 때 협력사로 LG전자와 손을 잡을 가능성이 커지면서 업계의 이목이 집중되고 있다.
5-24. SK텔레콤
- 국적: 한국
통신 업체들 또한 자율주행 고도화를 위한 필수 기술인 V2X와 5G 기술 개발 및 자율주행차량 개발에 속도를 내고 있다. SK텔레콤은 2017년 인텔, BMW, 모빌아이 등과 함께 자율주행차를 개발하기로 한 바 있다. 또 서울시내 차량과 보행자, 교통 인프라 등을 5G로 연결하는 차세대 지능형 교통시스템인 'C-ITS(차세대 지능형 교통시스템)' 실증사업도 진행하였다.
5-25. KT
- 국적: 한국
KT는 2018 평창동계올림픽 시범 서비스, 판교 자율주행 버스 체험행사, 영동대로 자율주행차 국민 체감 행사 등에서 자율주행 버스를 선보였다. 이러한 성과를 바탕으로 KT는 2022년 판교 제2테크노밸리 스마트 산업단지에서도 자율주행 전기버스를 운행하기로 했다.
5-26. LG유플러스
- 국적: 한국
'LG 유플러스'는 세종시 자욜주행 실증 차량의 데이터를 수집·분석하는 자율주행 빅데이터 관제센터를 건설했다. LG유플러스는 2019년 '한양대 자동차 전자제어연구실(에이스 랩)' 등과 자율주행차량을 개발하여 자율주행 및 자율 주차를 시연하기도 했다.
5-27. 네이버 랩스(Naver Labs)
- 국적: 한국
'네이버 랩스(Naver Labs)'는 2018년, 사람과 자율주행 머신을 위한 'XDM(eXtended Definition & Dimension Map)'플랫폼을 구축하고 자율주행차를 위한 HD 맵 기술을 공개했다. 2017년 국내 ICT 업계 최초로 자율주행차량 임시면허를 획득한 네이버 랩스는 도요타 차량을 이용하여 자율주행차량 시스템을 시험 중이다. 차량용 인포테인먼트 플랫폼, 자율주행차 관련 다수의 특허도 출원했다.
5-28. 포티투닷(42dot)
- 국적: 한국
2019년에 설립된 자율주행차 스타트업 '포티투닷(42dot)'은 서울 상암 자율주행 자동차 시범운행지구에서 2022년 1월부터 자율주행차 유상 운행을 시작했다. 스마트폰 앱 Tapi로 호출하여 이용할 수 있으며, 노선은 한샘 사옥 앞에서 출발하여 상암중학교까지 총 5.3km를 주행한다.
5-28. 현대모비스
- 국적: 한국
'현대모비스(hyundai mobis)'는 2019년부터 러시아 대표 ICT 기업 '얀덱스(yandex)'와 협업하여 자율운행차 플랫폼을 개발하고 있다.
5-29. 한국전자통신연구원
- 국적:한국
'한국전자통신연구원(ETRI)'는 운전석이 없는 국내 최초의 자율주행 레벨 4차량 '오토비(AutoVe)'를 개발 중이다. '오토비'는 2021년 6월부터 연구원 내부에서 동과 동 사이를 자율주행하는 시범 서비스를 시작했다. 오토비는 모바일 기기를 통해 음성으로 호출하여 탈 수 있다. 시속 25km 제한 속도로 이동하며 카메라와 라이다 센서를 장착하고 있다. ETRI는 2027년 세계 최초의 운전자 없는 완전 자율주행차 사용화라는 목표를 가지고 있다.
6. 자율주행 기술 시장 동향
6-1. 세계 현황
최근 자율주행차와 관련된 다양한 기술이 속속 개발되면서 시장 또한 급속히 성장할 것으로 기대되고 있다. 현재 '자율주행차' 산업을 태동기를 지나 지속적으로 성장할 유망산업으로 평가받고 있다. 부품 및 개별 요소 기술이 발전하며, 시장이 점차 확대될 것으로 전망된다. 자율주행차는 신기술이 시장을 리드하는 대표적인 기술 집약 산업이다. 자동차 산업은 패러다임이 변화하면서, 주요 핵심기술이 기계 중심에서 전기, 전자, 정보통신 기술로 빠르게 이전되고 있는 중이다.
또 기존의 자동차 산업 가치사슬은 수직적 피라미드 구조였으나, 자율주행차 산업은 부품 및 IT 기업의 역할이 중요해지면서 서비스 제공 중심의 수평적 구조로 변화할 것으로 보인다. 이에 따라 완성차 기업들의 영향력이 적어지는 반면, 고객과의 접점을 가지고 있는 서비스 플랫폼의 영향력은 확대될 것으로 예상된다. 자동차 산업에서의 통신 업체, IT, 플랫폼, 소프트웨어, 콘텐츠 업체의 역할이 점점 중요해질 것으로 전망된다.
자율주행 자동차 시장 전망은 조사업체와 조사 시기에 따라 다양하게 나타난다. 시장조사업체에는 '프로스트앤설리반(Frost&Sullivan)', '보스턴컨설팅그룹(BCG: Boston Consulting Group)', 'HIS Markit', '프라이스워터하우스 쿠퍼스(PwC: Pricewaterhouse Coopers)', '마케츠 앤 마켓(Markets and Markets)', '스태티스타(Statista)' 등이 있다.
6-1-1. 프로스트 앤 설리반
먼저 글로벌 시장조사업체인 '프로스트 앤 설리반(Frost&Sullivan)'의 자료를 살펴보자. 2018년에 나온 Global Autonomous Driving Market Oulook의 2018년 자료에 의하면, 2023년까지 레벨 3 및 레벨 4 등급의 자율주행 기능을 갖춘 자동차가 전 세계적으로 판매되는 차량의 약 0.8%와 2.3%를 차지할 것으로 전망했다. 이중 개인 소유 자율주행차의 총 시장규모는 2023년까지 60.01억 달러가 될 것으로 예상했다.
6-1-2. 보스턴컨설팅그룹
글로벌 컨설팅 업체 '보스턴컨설팅그룹(BCG: Boston Consulting Group)'는 자율주행차 시장 규모가 2025년에 420억 달러에서 2035년이 되면 770억 달러 규모로 성장할 것으로 예측했다. 그때가 되면 자율주행차가 세계 자동차 판매량의 25%를 차지하면 완전 자율주행차는 1200만 대, 부분 자율주행차는 1800만 대에 이를 것으로 내다보았다.
6-1-3. HIS Markit
영국의 시장조사업체 'HIS Markit'의 2016년 자료에서는, 자율주행 자동차가 관련 규제가 적은 북미와 유럽을 중심으로 초기 시장을 형성한 뒤, 2025~2035년에 급성장할 것으로 예측하였다. 자율주행 자동차의 세계 판매량이 2025년 60만 대에서, 2035년에는 2100만 대에 이르게 될 것이라는 전망이다.
6-1-4. PwC
'프라이스워터하우스 쿠퍼스(PwC: Pricewaterhouse Coopers)'는 영국 런던에 본사를 둔 다국적 글로벌 회계 컨설팅 기업이다. 1998년 '프라이스워터하우스(PriceWaterhouse)'와 쿠퍼스 앤 라이브랜드(Coopers & Lybrand)가 전 세계적으로 대대적인 합병을 하면서 출범하였다. ''프라이스워터하우스 쿠퍼스(PwC)'에서는 신차 중 레벨 3 이상 자율주행차 비중이 2020년에 6%에서 2025년에는 25%, 2030년에는 62%로 확대될 것으로 전망했다.
6-1-5. IHS오토모티브
'IHS오토모티브'에서는 2040년이면 전 세계 자율주행 자동차 3300만 대가 도로 위를 달릴 것이라는 낙관적인 전망을 내놓았다. 이는 그때쯤이면 신차 판매량이 26%가 자율주행차일 것이라는 계산에서 나온 것이다. 'IHS오토모티브'는 처음으로 개인소유의 자율주행차가 출시되는 2021년에는 판매량이 5100대를 넘어서고, 2025년에는 공유 차량과 개인 소유의 차량을 합쳐, 약 백만 대가 판매될 것으로 예측하였다.
6-1-6. 마케츠앤마켓
자율주행차 연료의 종류에 따라 시장을 분류하여 예측한 결과도 있다. 미국의 시장조사업체 '마케츠 앤 마켓(markets and markets)'은 전 세계 고급 자율주행차 시장을 '순수 전기 자동차형', '하이브리드/플러그-인 하이브리드 자동차형', '내연기관 자동차형, '수소연료전지 자동차형으로 분류하고 각각의 시장을 전망했다. 마케츠앤마켓의 2018년 시장조사 결과에 의하면, 가장 큰 성장 가능성이 있는 시장은 '순수 전기자동차형 자율주행차' 시장이다. 2025년 '순수 전기자동차형 자율주행차'는 14124대가 출시될 것으로 예상되지만, 2030년에는 연평균 39.64%가 성장하여 74983대가 출시될 것으로 전망되었다.
6-1-7. 스태티스타
기술별로는 '라이다(LiDAR)' 기술이 자율주행 관련 기술 중 시장 잠재력이 가장 높은 것으로 꼽혔다. 시장조사업체 독일의 시장조사업체 '스태티스타(Statista)'는 라이다 기술 시장 규모가 2050년에 980억 3600만 달러로 성장할 것으로 전망하였다. 그다음은 '레이더(Ladar)' 기술로, 2050년까지 시장 규모가 337억 9100만 달러까지 확대될 것으로 예상하였다. 차량과 사물 간 통신을 뜻하는 'V2X(Vehicle to Everything communication)' 시장도 330억 3470만 달러 규모로 성장할 것으로 보았다.
아래의 표는 2050년 기준, 자율주행차 기술별 시장 규모를 예측한 것이다. (출처: 글로벌 자율주행차 시장 보고서 - 글로벌 ICT 포털)
| 기술 | 시장규모(억 달러) |
| 라이다(LiDAR) | 980 |
| 레이다(Radar) | 340 |
| V2X | 330 |
| 카메라 | 280 |
| 지도 | 240 |
| 보안 소프트웨어 | 230 |
| 임베디드 제어 | 220 |
| HMI | 220 |
| 전기 및 전자 아키텍쳐 | 130 |
| 제어 시스템 | 90 |
| 패시브장치 | 20 |
| 임베디드 모뎀 | 10 |
6-2. 국내 현황
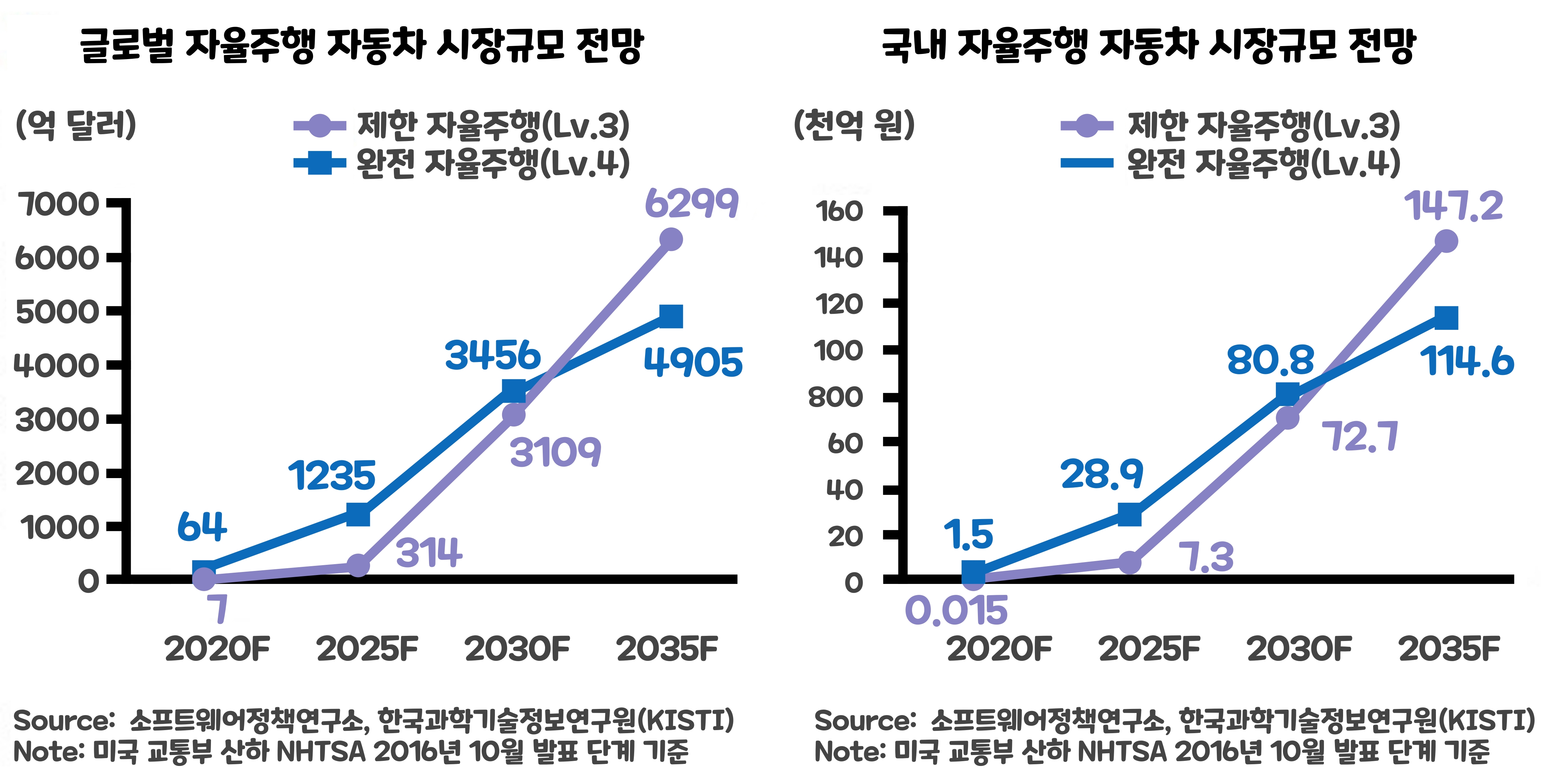
자율주행차의 국내시장 규모는 미국·유럽·중국에 비해서는 작지만, 글로벌 수준의 자동차 생산력과 ICT 기술력을 바탕으로 점차 성장기반을 확보할 것으로 기대되고 있다. 이에 따라 시장규모는 2020년 1509억 원에서 연평균 41% 성장하여 2035년에 약 26조 1794억 원에 달할 것으로 전망된다.
자율주행차 시장은 차량 판매 외에도 통신, 보안, 소프트웨어, 인공지능 등 융합시장을 창출할 것으로 예상된다. 일례로 최근 가방 활발하게 연구되고 있는 '자동차용 인공지능 모듈'의 경우, '소프트웨어와 서비스', '하드웨어' 및 '빅데이터 플랫폼'을 모두 포함하면 2030년경에는 약 90억 달러 이상의 세계시장이 형성될 것으로 보인다. 특히 ICT 분야는 전통적으로 유럽이 강세인 완성차 시장에 비해, 국내 기술력과 시장점유율이 상대적으로 크게 높은 분야이다. 이에 국내 자율주행차 시장의 향후 전망은 매우 밝을 것으로 기대된다.
7. 자율 주행 관련 각국의 정책 동향
7-1. 미국의 정책 동향
미국에서는 2012년 연방정부 및 주정부 차원에서 자율주행차 합법화를 위한 법적·제도적 기반을 마련하기 시작했다. 2012년 네바다주에서 자율주행차의 일반 도로 시험운행을 처음으로 합법화한 이후, 2018년까지 캘리포니아주, 플로리다주, 애리조나주, 워싱턴 D.C. 등 37개의 주정부에서 입법을 완료했다. 연방정부는 2017년에 입법을 완료했다.
또 'NHTSA(미국 도로교통안전국)'은 2016년 '연방 자율주행차 정책(Fedral Automated Vehicles Policy)' 가이드라인을 발표한 후, 2018년까지 총 3차에 이르는 가이드라인을 발표했다. 2016년 처음 발표한 가이드라인은 자율주행차 관련 입법 방향과 정책 가이드라인을 제시한 것이었다. 제2차 가이드라인에서는 1차에서 제시한 15개의 기술적 가이드라인을 12개로 통합하고 '안전'을 강조하였다. 제3차 가이드라인은 'DOT(미국 교통부)'에서 발표하였으며, 자율주행차량 관련 안전·기술·정책·인프라 전략과 정부·민간의 역할 구분을 제시하였다.
2020년 1월에는 38개 주정부 부처 등이 참여하여 '자율주행차 정책 4.0(Automated Vehicle 4.0)'을 발표하였다. 이 정책은 자율주행차 기술 진흥을 위해 첨단 제조, 인공지능, 'STEM(Science, Technology, Engineering, Mathematics)' 교육 및 인력 배양과 기초연구, 관련 인프라, 규제, 세제, 지식 재산권 등 광범위한 분야에 대한 방향성을 제시하고 있다.
7-2. 영국의 정책 동향
영국의 AEV Act8(Automated and Electric Vehicle Act8)'은 자율주행자동차 사고 관련 법적 책임과 전기차량 충전 인프라 등에 대한 제도적 기반을 마련한 법률이다. 이 법은 자율주행 자동차에 의해 부상당한 사람이 보상을 위해, '생산물 배상 책임 청구'와 같은 다른 법적 수단에 의지하지 않고, 보험업자에게 직접 청구할 수 있도록 하는 내용을 담고 있다. 사실상 운전자에 대한 책임을 면제한 것이다. 보험업자는 차량 제조·설계자에게 소프트웨어 개발을 포함하여 과실 비용 청구가 가능하도록 했다.
영국 정부는 200만 파운드 가량의 자금을 투자하여 '커넥티드카 및 자율주행차 센터(CCAV: Centre for Connected and Autonomous Vehicles)'를 설립하였다. CCAV는 자율주행 자동차를 개발하고 시험하는 분야에서 선도적인 지위를 유지하겠다는 목표로, 교통부, 경제부, 에너지부, 산업 전략부의 합작으로 세워진 기관이다.
7-3. 독일의 정책 동향
독일 정부는 도로교통법 8차 개정을 통해 자율주행 시 운전자의 행동 양태 및 책임에 중점을 둔 자율주행 관련 법규를 추가하고, 이와 관련된 윤리 지침을 제정하였다. 개정된 도로교통법에서는 자율주행 기능과 관련된 법적 규제를 설정하고, 자율주행 기능 구현의 기본 틀을 제시하였다.
2017년 6월에 발표된 '자율주행 윤리지침(Ethic Commission Automated and Connected Driving)'은 '개인에 대한 보호'를 다른 모든 실용적 고려 사항들보다 우선시하고 있는 점이 특징이다. 또한 자율주행 시스템의 운행 면허는 사람의 운전과 비교해 위험이 낮다고 확인되지 않는 이상, 정당화될 수 없음을 명시하였다.
7-4. 일본의 정책 동향
일본 정부는 레벨 3 수준의 자율주행 자동차 운행 허용을 위한 관련 법률 개정안을 의결하고 2020년부터 시행 중이다. 기존에는 일반 도로에서 운전자를 운전 주체로 전제한 레벨 2 이하 수준의 자율주행 자동차까지 운행할 수 있었지만, 2019년 3월 도로교통법 및 도로운송차량법을 개정하여 일반 도로에서 레벨 3 수준의 자동차가 주행할 수 있게 되었다. 개정된 법률에는 기존 법에 자율주행차량 운행과 관련한 안전의무 및 대책이 추가되었다.
7-5. 중국의 정책 동향
2016년 중국은 '정통 자동차 과학기술 5개년 계획'을 통해 신에너지 차량, 인공지능 분야의 기술 개발을 추진하겠다고 발표하였다. 또한 2018년에는 '국가 발전개혁 위원회(NDRC)'는 자율주행차 3단계 발전 전략을 제시하였다. 1단계는 2020년 관련 제도를 수립하고, 주요 지역 및 도로의 LTE 기반 V2X 차량 통신 네트워크를 확보하는 것이다. 2단계는 2025년까지 신차의 거의 100%를 '지능형 차세대 무선 통신 네트워크인(5G 기반 V2X)'로 작동하겠다는 내용이다. 2030년까지 자율주행 선도 국가로 도약하겠다는 것이 마지막 3단계이다.
2019년 중국 국무원이 도로 교통 자율주행 발전 촉진 의견을 제시하였고, 2020년 2월에는 11개 국가 부처와 위원회가 스마트 자동차 혁신 발전 전략을 발표하였다.
7-6. 한국의 정책 동향
한국은 2017년 혁신성장 동력 추진계획에 자율주행차를 포함하면서, 4차 산업혁명에 대응하고 자율주행차 기술을 육성하기 위한 맞춤형 전략을 마련하였다. 추진계획에서 자율주행차 분야는 13대 혁신성장 동력 중 조기 상용화 분야에 속하며, 범부처 협력을 통해 관련 규제를 개선하고, 금융 지원과 인프라 조성을 추진할 계획이다.
이에 따라 2018년에 발표된 시행계획을 보면, 2022년 자율주행 레벨 3 상용화를 목표로 구체적인 규제 개선과 인프라 구축 계획이 제시되어 있다. 또 같은 해 발표된 '자율주행차 상용화를 위한 스마트 교통 시스템 구축 방안' 에도 2030년 완전 자율주행 실현을 목표로, 2020년까지 레벨 3의 고속도로 자율주행을 실현하겠다는 목표를 밝혔다. 또 2022년까지는 레벨 4~5의 완전 자율주행의 기반을 마련하겠다는 방향을 제시하였다.
2019년 10월에는 미래차 산업 발전전략이 발표되었다. 내용은 2021년까지 레벨 3 자율주행차를 출시하고, 2024년까지 레벨 4 자율주행차를 일부 도로 구간에서 사용화하고, 2027년에는 레벨 4 자율 자율주행차를 전국 주요도로에서 상용화한다는 내용이다. 또한 발전전략에는 완전 자율주행 상용화를 위해 2024년까지 제도와 인프라를 완비하고, 핵심부품에 투자하겠다는 내용이 담겼다.