'하야부사2(Hayabusa2)'는 2018년 6월에 소행성 '류구(Ryugu)'에 도착한 'JAXA(작사, 일본 우주항공연구개발 기구)'의 소행성 탐사선이다. 2014년 발사된 소행성 탐사선 '하야부사 2'는 2018년 6월 말에 마침내 소행성 '류구'에 도착해 탐사를 시작했다. 하야부사 2의 사명은 류구의 암석을 지구로 가지고 귀환하는 것이다. 태양계 탄생의 수수께끼를 풀 암석을 채취하려는 것이다.
0. 목차
- 하야부사2(Hayabusa2)
- 30억 km, 3년 반에 이르는 '대항해'의 궤적
- '하야부사2'의 터치 다운
- '하야부사2'의 귀환
- 류구의 암석을 분석하면 무엇을 알 수 있는가?
- 하야부사2 갤러리

1. 하야부사2(Hayabusa2)
1-1. '하야부사 1'의 경험을 바탕으로 '하야부사 2'가 개량되었다.
2010년 6월, 소행성 탐사선 '하야부사 1'이 여러 난관을 극복하며 기적적으로 지구로 귀환해 커다란 화재가 되었다. 하야부사 1(Hayabusa 1)'은 태양을 선회하는 소행성 '이토카와'에서 소량의 모래를 가지고 돌아왔다. 그 후속 탐사선인 '하야부사 2'의 사명은 소행성 '류구'의 모래와 암석을 0.1g 정도 가지고 돌아오는 것이다. 류구의 암석은 물과 유기질을 함유한 것으로 알려져 있다. 그것을 분석함으로써 태양계 탄생의 수수께끼를 풀고, 더 나아가 생명 탄생의 수수께끼에 한층 더 다가갈 힌트를 얻을 수 있다고 기대하는 것이다.
하야부사2의 발사 계획이 본격적으로 검토되기 시작한 것은 2006년으로, 당시 '이토카와(Itokawa)'에 있던 하야부사가 통신 두절 상태에 빠졌을 때였다. 그 무렵 '완전히 실패했다'고 생각하던 하야부사의 재도전으로 '하야부사 2' 계획이 시작되었다. 최종적으로 '하야부사'는 귀환했지만, 장치의 연이은 고장으로 그 항해는 모험의 연속이었다. 그래서 '하야부사 2'에는 하야부사의 경험을 살려 다양한 개량이 이루어졌다.
1-2. '하야부사2'의 계획
- 로켓 발사: 2014년 12월 3일, 하야부사 2를 실은 'H IIA 로켓 26호기가 일본 다네가섬 우주센터에서 발사되었다. 로켓에서 분리된 하야부사2는 약 3년 만에 항해 후 도착했다.
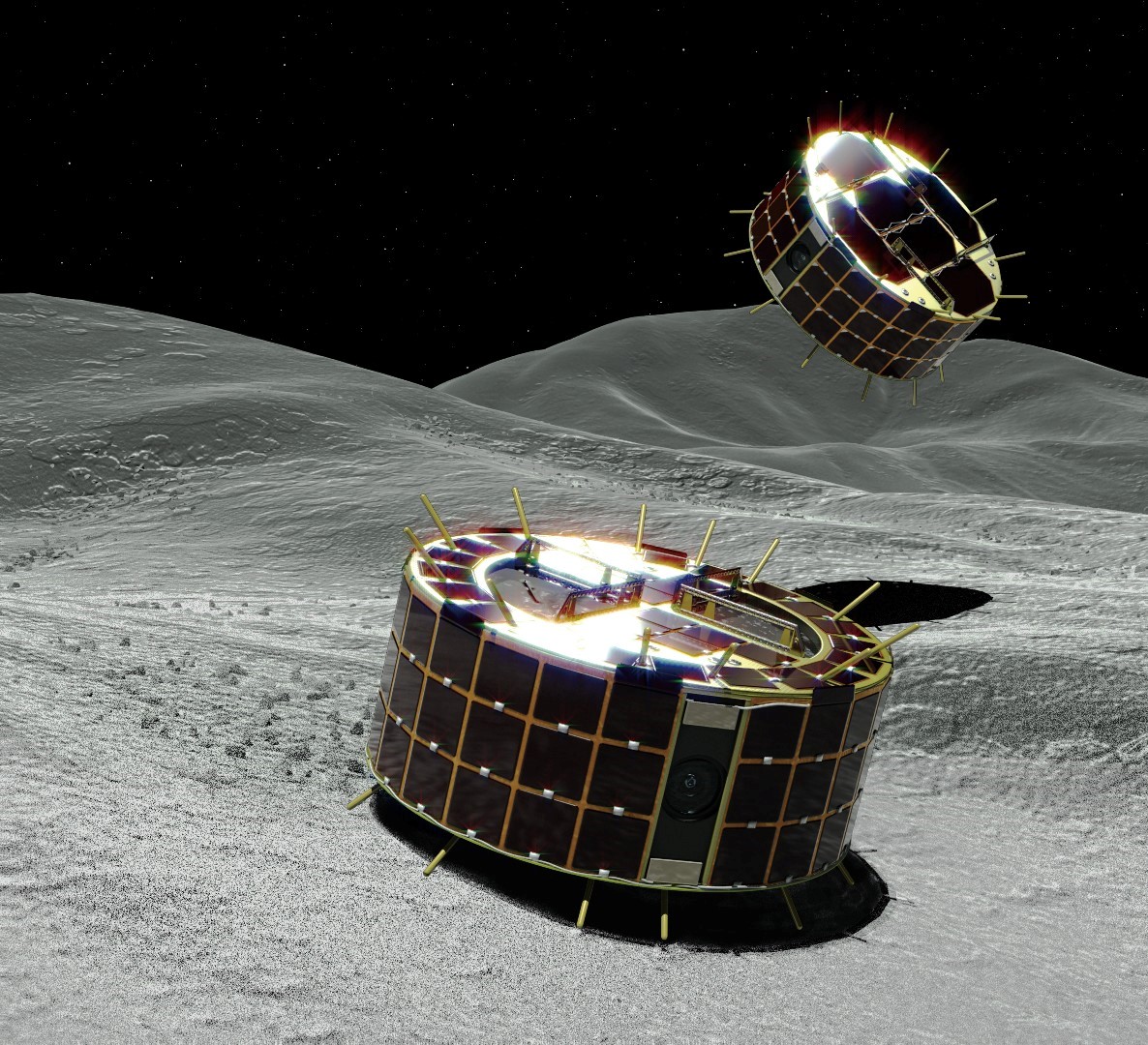
- 탐사 로봇과 착륙선을 투하: 일본인 개발한 3기의 소형 탐사 로봇 '미네르바 II'와 독일·프랑스가 공동 개발한 착륙선 '마스코트'의 일부가 9~10월 무렵 투하될 예정이다. 이들은 류구를 촬영하거나 표면 온도를 측정한다.
- 추를 떨어뜨리고 곧바로 대피: 2019년 3월 무렵에는 2kg의 추가 들어 있는 '충돌 장치'를 분리시키고 낙하 중에 폭약을 터뜨림으로써 추를 가속시켜 류구에 충돌시킬 예정이다. 충돌로 화구를 만들고 노출된 지하의 암석을 채취한다. 충돌할 때 발생하는 파편을 피하기 위해 '하야부사 2'는 류구의 반대쪽으로 일시 대피한다. 류구의 표면에 있는 암석은 우주에 날아다니는 '우주선'이나 충돌한 조그만 운석에 의해 변질되었을 것으로 생각된다. 이를 '우주 풍화'라고 한다. 따라서 '우주 풍화'에 노출되지 않은 지하의 암석이 채취되기를 기대한다.
- 화구 내부와 주변에 착륙: 추의 충돌을 통해 만들어질 화구는 지름 2m 정도로 추정된다. 화구가 성공적으로 만들어지면 그 내부와 주변에 3회째 터치다운을 시도한다. 하야부사의 경우 착륙 지점의 정확도는 50m 정도였지만, 하야부사 2는 몇 m 크기의 화구를 목표로 착륙하기 때문에 '타깃 마커(착륙할 때 표적이 되는 조그만 공)'를 5개 가지고 있다. '타깃 마커(Target Marker)'를 류구에 반복적으로 떨어뜨리면서 목표한 지점에 착륙할 수 있도록 정확도를 높여 간다.

1-3. 장치의 '개량'과 '다중화'로 신뢰도를 높였다.
'하야부사'의 경우, 가스 분사를 통해 자세를 제어하는 화학 추진계 '스러스터(Thruster)'의 추진제가 새어 나와 자세가 흐트러져 교신이 끊어진 경우가 있었다. 그런 다음 12기의 화학 추진형 스러스터가 완전히 고장 났기 때문에, 하야부사 2에서는 추진제의 누설이나 동결을 방지하는 배관으로 변경했다. 또 내부에 탑재된, 회전을 제어하기 위한 회전 원반인 '리액션 휠(Reaction Wheel)' 3기 가운데 2기가 고장 났기 때문에, 하야부사 2에는 '리액션 휠'을 4기로 늘려 고장에 대비했다. 그리고 본체에서 분리되어 류구 표면에서 관측할 소행성 탐사 로봇인 '미네르바-II(MINERVA-II)' 3개와 소행성 탐사선 '마스코트(MASCOT)'도 탑재했다.
그 밖에도 스스로 자세를 파악하기 위해 천체를 관측하는 장치인 '스타 트래커(Star Traker)'가 1기에서 2기로 증설되거나 새로운 주파수대를 사용해 고속 송신을 하기 위한 데이터 송신용 안테나가 1기에서 2기로 증설되는 등 다양한 장치가 '다중화'되었다. 즉, 통신에 사용하는 전파의 주파수 종류를 늘려, 더 많은 관측 데이터를 지구로 보낼 수 있게 했다.
그리고 탐사용 관측장치도 새로 탑재되었다. 하야부사 2가 샘플을 채취하는 '류구'에는 물을 포함한 암석이 있을 것으로 생각된다. 따라서 적절한 파장의 적외선을 포착함으로써 물의 존재를 확인하는 '근적외 분광기(Near Infrared Spectrometer)'도 탑재되었다.
최대의 특징은 인공 '화구(Crater)'가 생성되는 실험을 한 점이다. 탄환을 발사해 샘플을 채취하는 방법은 앞선 하야부사1과 같지만, 하야부사2에서는 '임팩터'라고 하는 충돌 장치가 탑재되었다. '임팩터'를 사용해 구리 덩어리를 발사함으로써 인공적으로 화구를 만들고, 그곳에서 샘플을 채취할 수 있었다. 인공 화구를 만들면 소행성의 지하에 있는 풍화되지 않은 물질을 얻을 수 있다.
| - | 하야부사 | 하야부사 2 |
| 본체의 크기 | 폭1m×길이1.6m×높이1.1m | 1m×길이1.6m×높이1.25m |
| 질량 | 510kg(연료 포함) | 609kg(연료 포함) |
| 목표 소행성 | 이토카와(S형 소행성) | 류구(C형 소행성) |
| 통신 주파수대 | X밴드(7~8GHz) | X밴드(7~8GHz), Ka밴드(32GHz) |
| 주요 탐사 장치 | 광학 항법 카메라, 근적외 분광기(하야부사 2의 근적외 분광기와는 관측 파장역이 다르다), 형광 X선 스펙트럼 미터, 레이저 고도계, 샘플러 혼, 미네르바 등 | 광학 항법 카메라, 근적외 분광기, 중간 적외 카메라, 레이저 고도계, 분리 카메라, 충돌 장치, 샘플러 혼, 미네르바 II, 마스코트 등 |
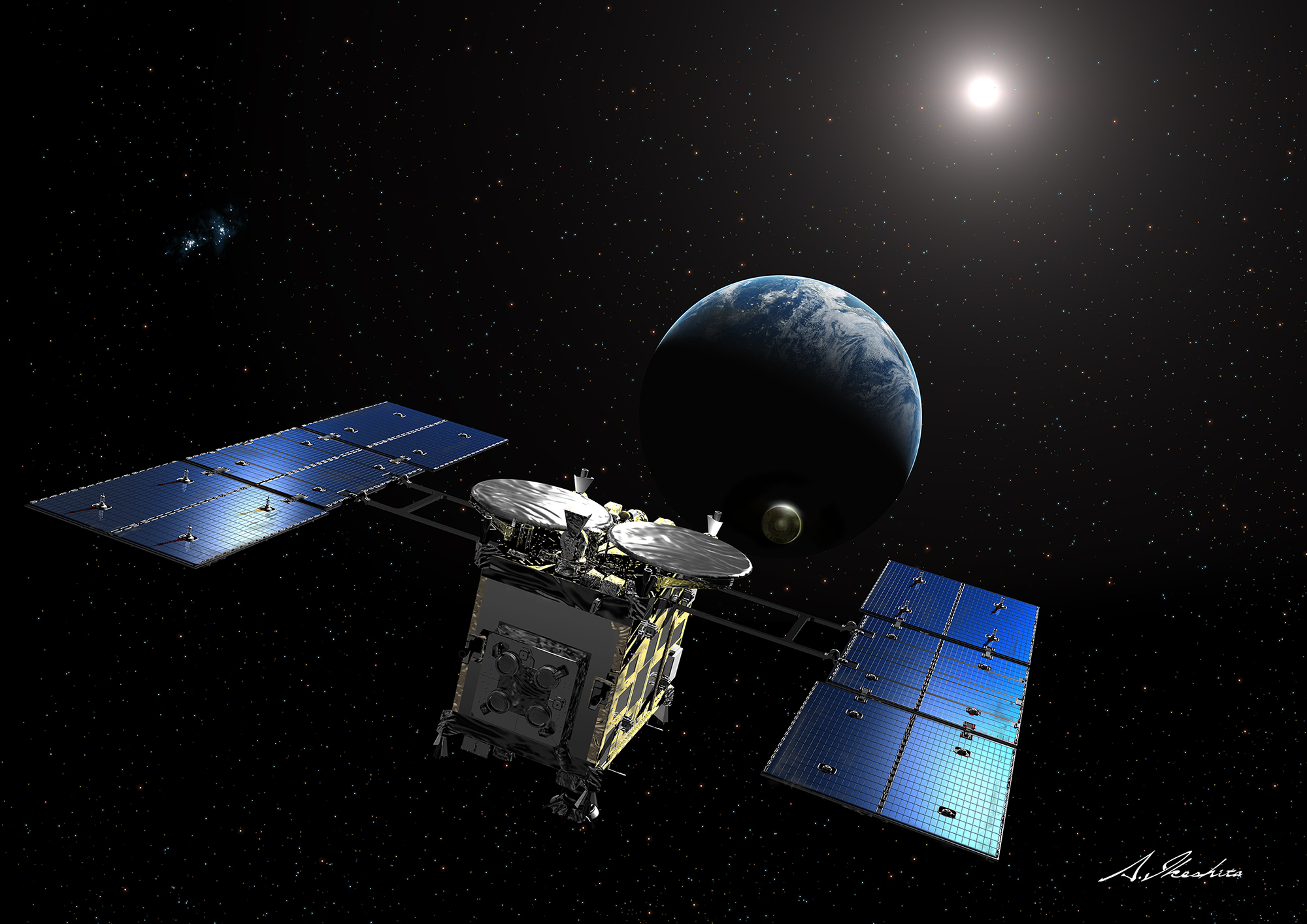
1-4. 하야부사2의 구조
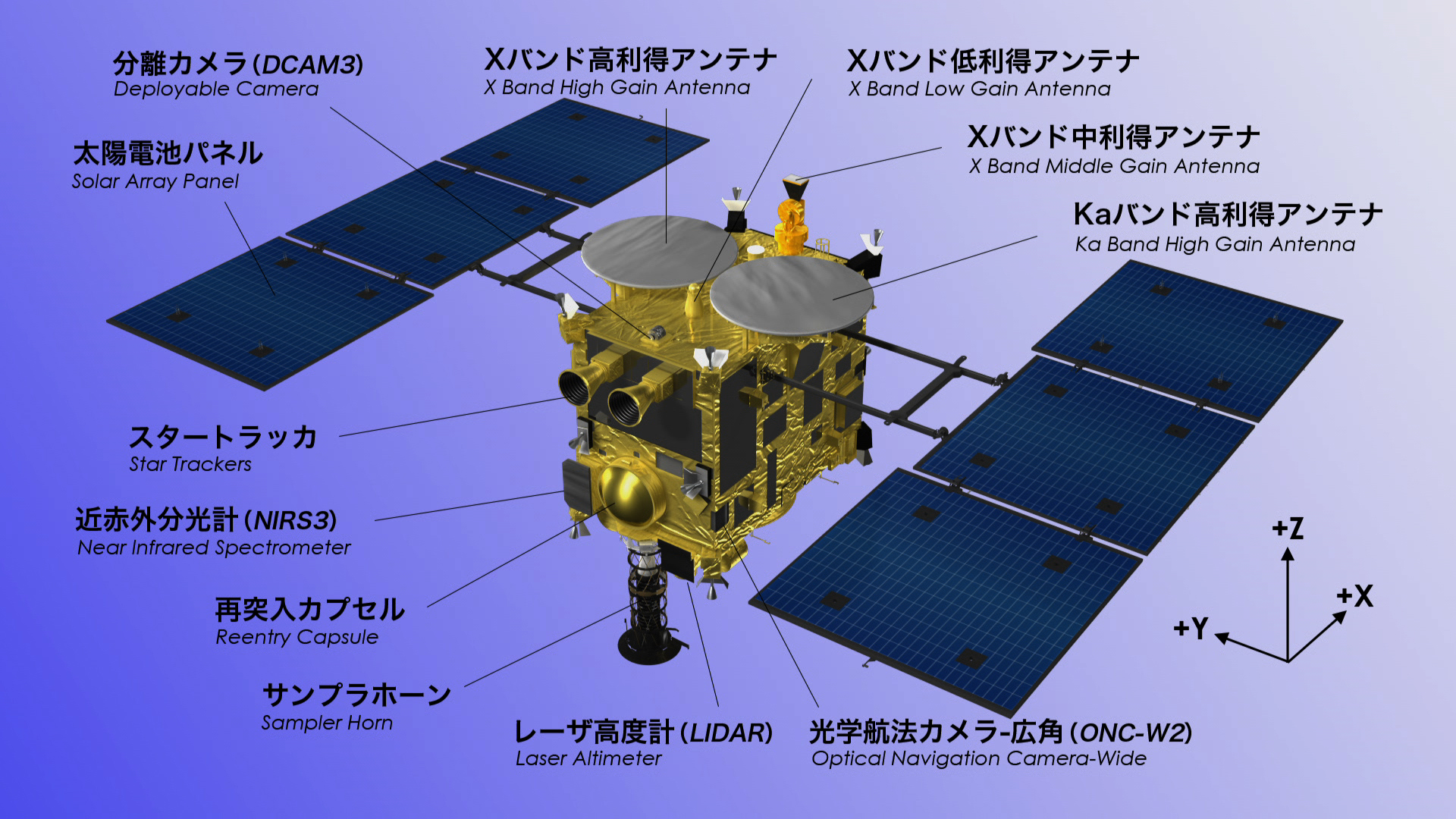
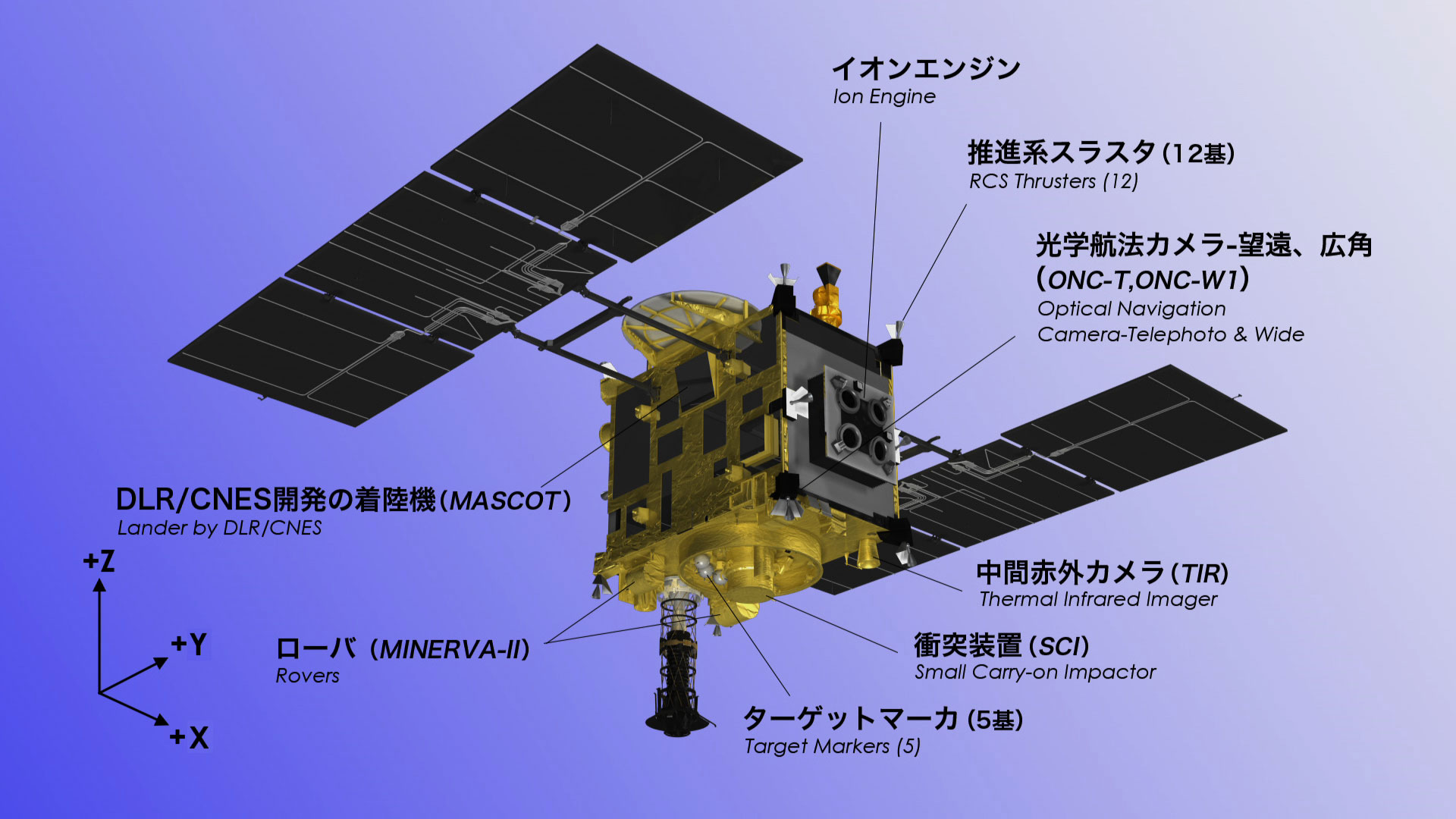
아래의 그림은 하야부사의 주요 장치를 그림으로 나타낸 것이다.
- 분리 카메라(Deplyable Camera): 인공 화구를 만들 때 추와 함께 분리되어 그 모습을 관측한다.
- 태양 전지판(Solar Array Pannel): 태양광 발전을 하는 하야부사2의 생명선. 길이는 약 4.2m
- 스타트래커(Star Trackers): 관측한 항성의 위치를 통해 하야부사2의 자세를 측정한다.
- 근적외 분광계(Near Infrared Spectrometer): 파장 1.8~3.2μm의 적외선을 포착해 물을 포함한 암석의 분포를 조사한다.
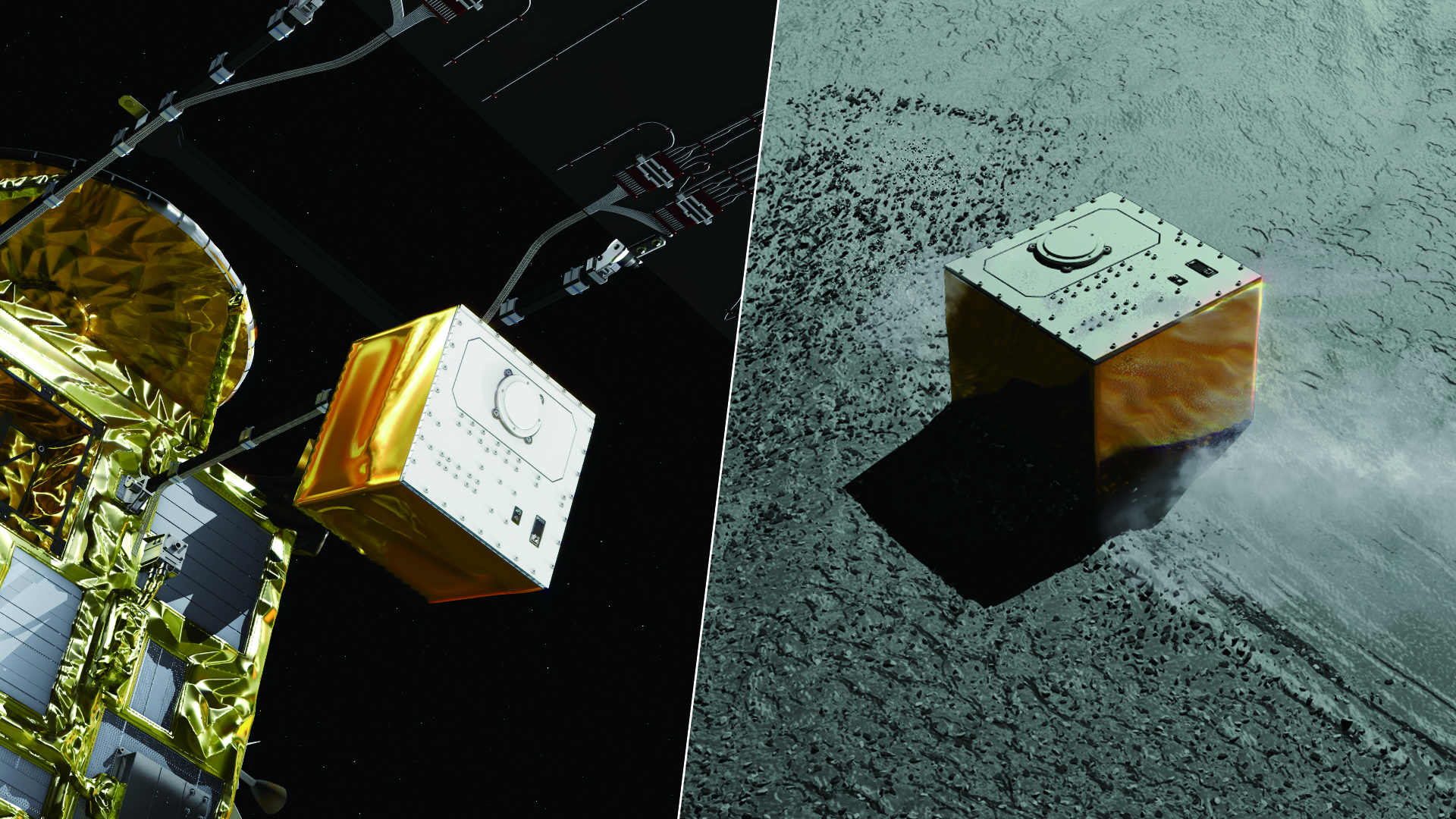
- 재돌입 캡슐(Reentry Capsule): 채취한 샘플이 들어 있는 캡슐. 대기권 밖에서 지구로 떨어뜨린다.
- 샘플러 혼(Sampler Horn): 터치다운할 때 내부에서 탄환을 발사해 암석이나 모래를 날리거나 내부에 달린 관절팔 부분으로 건져올려 암석과 모래를 채취한다.
- 레이저 고도계(Laser Altimeter): 소행성에 발사한 레이저광이 반사해 돌아올 때까지의 시간을 바탕으로 소행성까지의 거리를 측정한다.
- (Optical Navigation Camera-Wide): -
- Ka밴드 고이득 안테나(Ka Band High Gain Antenna): 'Ka밴드'(32GHz)의 전파를 송신하는 안테나. X밴드 안테나에 비해 4배의 데이터를 송신할 수 있다.
- X밴드 저이득 안테나(X Band Low Gain Antenna): -
- X밴드 중이득 안테나(X Band Middle Gain Antenna): -
- X밴드 고이득 안테나(X Bnad High Gain Antenna): 'X밴드'(8GHz)의 전파를 송신하는 안테나
- 마스코트(MASCOT): 독일과 프랑스가 공동 개발한 소형 착륙선이다. 류구에 투하된다.
- 미네르바-II(MINERVA-II): 일본인 개발한 소형 탐사 로봇이다. 류구에 투하된다.
- 타깃 마커(Target Marker): 류구에 투하되어 터치다운할 때 표적이 된다.
- 충돌 장치(Small Carry-on Impactor): 2kg의 추와 폭약이 들어 있는 장치. 인공 화구를 만들 때 낙하시킨다.
- 중간 적외 카메라(Thermal Infrared Imager): 파장 8~12μm의 적외선을 포착해 류구의 표면 온도를 측정한다.
- 화학 추진계 스러스터-계 12기(RCS Thrusters): 탑재된 합계 48kg의 추진제를 분사해 자세 제어나 궤도 수정 등을 한다.
- 이온엔진(Ion Engine): 제논 이온을 만들어 분사함으로써 가속한다. 개량을 통해 추진력이 20% 이상 향상되어 하야부사 2의 적재 중량도 20% 늘었다.
2. 30억 km, 3년 반에 이르는 '대항해'의 궤적
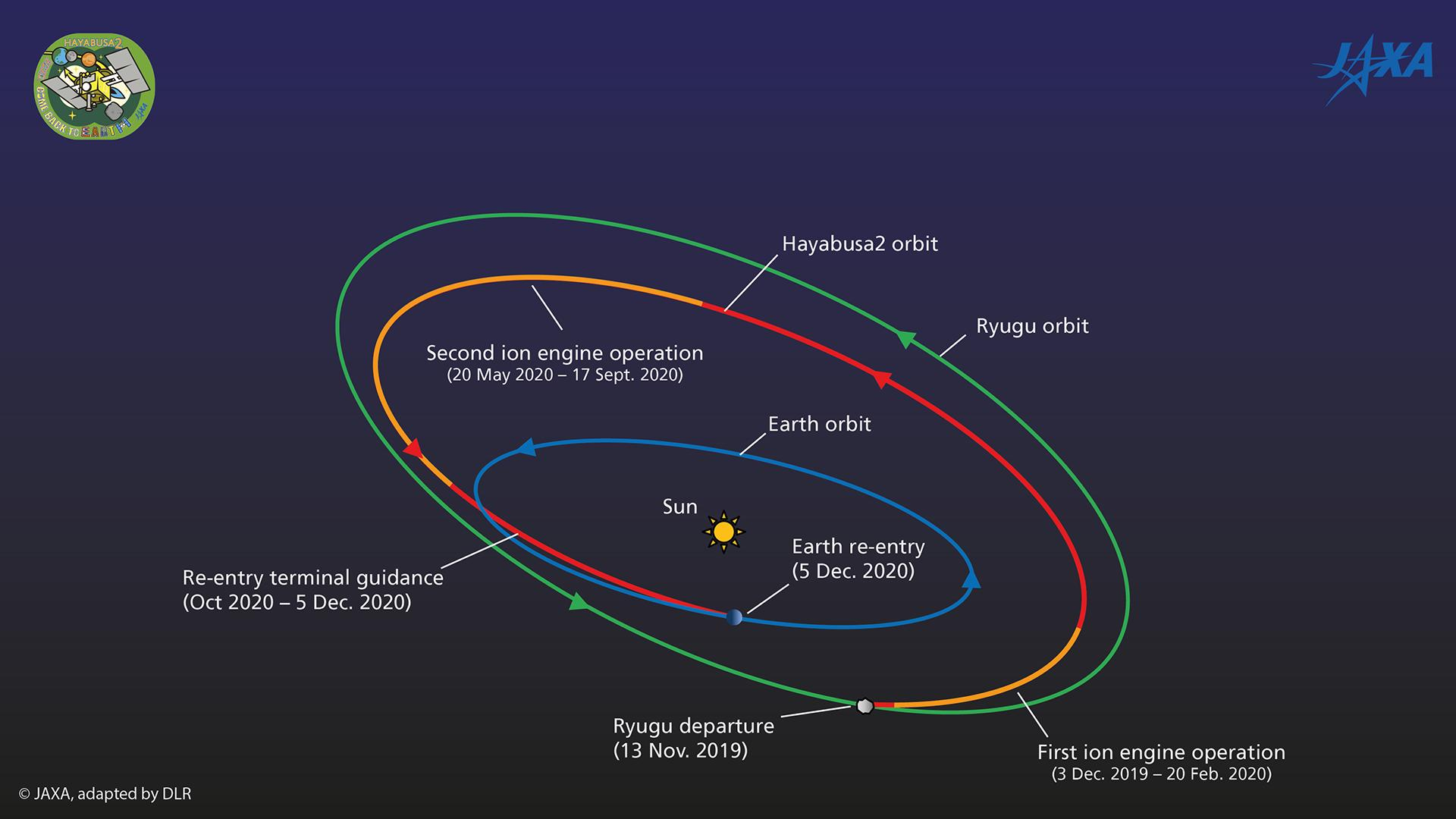
하야부사 2는 '류구'를 향해 항해를 계속했다. 하지만 그 사이에 하야부사 2가 류구를 향해 곧장 날아간 것은 아니다. 하야부사는 태양 둘레는 3바퀴 이상 돌면서 30억 km의 거리를 항해했다. 이것은 결코 멀리 돌아간 것이 아니다. 류구는 지구보다 약간 큰 궤도로 태양 둘레를 타원 모양으로 선회하는 소행성이다. '류구 도착'이란 '하야부사2'가 류구의 공전 궤도와 같은 궤도를 그리면서, 류구 근처에서 상대 속도 거의 0인 '정지 상태'가 되는 것을 의미한다. 결국, 태양을 선회하면서 가속과 감속을 거듭하며 조금씩 공전 반지름을 넓히면서 궤도를 수정해 나가야 한다.
지구를 출발한 '하야부사2(Hayabusa2)'는 먼저 1년에 걸쳐 태양을 한 바퀴 돌았다. 그리고 출발점과 거의 같은 지점에서 지구와 재회했을 때 지구의 중력을 이용해 그격히 가속하는 '스윙바이(Swing-by)'를 했다. 그다음 '이온 엔진(ion engine)'을 사용한 몇 개월의 감속 1회와 가속 2회를 하며 류구 궤도에 맞추었다. 2014년 12월에 발사된 '하야부사 2'는 2018년 6월 말에 '류구(Ryugu)'에 도착했다.
3. '하야부사2'의 터치다운
3-1. 터치다운 장소와 시기는 류구에 달렸다.
도착 후에는 류구의 상공 5~20km에서 약 1년 반 동안 머물며 류구를 탐사했다. 탐사의 핵심은 류구의 암석을 채취하기 위해 실행하는 '터치다운(Touchdown, 몇 초간의 착륙)'이다. 하야부사2가 도착하기 전까지는 류구의 '지형'과 '자천축'을 알 수 없었다. 그래서 하야부사2는 류구에 도착한 다음 최초 2개월 사이에서 지형의 요철과 물을 함유한 암석의 분포를 관측해 자세한 지도를 작성한다. 그 결과를 바탕으로 터치다운에 적절한 장소를 결정한다.
그러나 이때의 류구 자전축의 방향에 따라 제한된 영역의 지도밖에 만들 수 없다. 하야부사 2는 태양광을 에너지원으로 하고 있어, 항상 류구의 태양 쪽, 즉 공전 궤도 안쪽에 자리하고 있다. 만약 류구의 자전축이 공전궤도면에 대해 수직으로 서 있으면 모든 면이 연달아 나타나기 때문에 바로 모든 면의 지도를 만들 수 있다. 그렇지만 자전축이 태양이 방향을 향하고 있는 등 얼마 동안은 '북반구'만 보이는 경우도 있을 수도 있다. 그 경우 '남반구'에 터치다운에 적합한 장소가 있는지 바로 알 수가 없기 때문에, 후보 장소를 발견하면 곧바로 그곳에 착륙하는 임기응변적 판단이 필요해진다.
3-2. '가상 류구'에서 실시한 훈련 성과가 활용된다.
류구에서 나타난 기회를 놓치지 않고 터치다운을 확실히 성공시키기 위해 'JAXA(작사, 일본 우주항공연구개발기구)'에서는 시뮬레이션을 통한 터치다운 모의실험을 반복적으로 실시했다. 훈련에는 상세한 요철까지 만들어진 가상 류구 '류고이드(Ryugoid)'가 사용되었다. '류고이드'를 사용해 '터치다운 후보지 선정', '착륙', '샘플 채취', '이륙' 등 일련의 과정을 훈련했다.
'하야부사 2(Hayabusa2)'와 지구가 통신하는 데는 편도 약 20분이 걸린다. 이 시차도 고려한 실제와 흡사한 상황에서도 다양한 문제를 상정하면서 대략 50회의 훈련을 실시했다고 한다. 류구에 머무는 1년 반 동안 최대 3회의 터치다운을 실현·성공할 수 있을지의 여부는 도착 후에 이루어질 류구 관측과 그 후의 신속한 대응에 달려 있다.
3-3. 류구의 표면이 생각보다 울퉁 불퉁해 터치다운이 연기되었다.
'하야부사 2'는 당초 2018년 10월에 첫 번째 터치다운을 실시할 예정이었다. 그러나 류구의 표면이 예상 밖으로 울퉁불퉁해, 착륙하는 데 예상한 것보다 훨씬 높은 정밀도가 요구가 요구된다는 사실을 알게 되었다. 그래서 터치다운을 하기 위해서는 당초 상정한 것보다 높은 정확도로 기체를 제어할 필요가 생겼고, 확실한 착륙을 위해 터치다운 류구에 터치하는 시기가 2019년 1월 후반 이후로 연기되었다. 당시 JAXA의 '쓰다 유이치' 프로젝트 매니저는 '류구가 이빨을 드러내고 있다.'면서 프로젝트의 어려움을 토로했다. 그 후, 프로젝트팀은 류구의 표면 지형을 탐사하고 기체 움직임의 특성 등을 조사하면서 터치다운을 위한 준비를 강화했다
3-4. 문제 발생에 냉정하게 대처해 임무 수행에 성공했다.
터치다운 전날인 2019년 2월 21일 이른 아침, 하야부사 2는 어려움을 겪고 있었다. 하야부사 2는 실제로는 류구 상공 20km에 위치하고 있었지만, 스스로의 고도를 낮게 인식하고 있었다. '쓰다 유이치(津田雄一)' 프로젝트 매니저는 "지금까지 예상하지 않았던 실수였다."라고 말했다. 그러나 예상 밖의 실수였음에도 그 후 관제실에서는 대처가 잘 이루어졌다. 하야부사 2의 상태가 정상으로 확인되자, 예정보다 5시간 늦은 21일 13시 13분에 강하 속도를 약 2배인 초속 90cm로 변경해 류구로 내려가기 시작했다. '쓰다 유이치(津田雄一)' 프로젝트 매니저는 다음과 같이 말했다. '사실은 강하 속도를 올려 터치다운하는 훈련을 했기 때문에 비록 5시간 늦었더라도 예정된 장소에 터치다운할 자신은 있었다."
실제로 2019년 2월 21일 17시 30분 무렵에 계획된 스케줄에 도달하자, 다음 날 아침 예정대로 터치다운 프로그램이 시작되었다. JAXA의 '구보다 다카시' 연구 총주간은 '하야부사 2에는 몇 분 후에 무엇을 한다는 프로그램이 설정되어 있지 않다. 자세 제어나 타깃 마커의 포착 등 하나하나의 프로세스가 제대로 진행된 경우에 다음 단계로 나아가게 되어 있다."라고 말했다. 또 도중에 예측하지 못한 사태가 발생한 경우에는 기기의 고장 등을 막기 위해 하야부사 2는 터치다운을 포기하고 바로 부상하도록 프로그램되어 있다. 그러나 결과적으로 이 프로그램이 실행되지는 않았다.
3-5. 첫 번째 터치다운에서는 놀라운 정밀도로 착륙에 성공하였다.
하야부사2 프로젝트팀은 3회에 걸친 연습과, 착륙한 소형 착륙기로 얻은 데이터 등을 바탕으로, 하야부사 2가 태양의 그늘에 가려져 복잡한 통신을 할 수 없는 기간에 터치다운의 최종 일정을 결정하였다. 2019년 2월 22일, 오전 6시 15분, JAXA의 '쓰다 유이치(津田雄一)' 프로젝트 매니저는 터치다운을 예정대로 실행한다는 최종 판단을 내렸다. 터치다운용 명령은 전날까지 이미 하야부사 2에 도달해 있었다. 지구에서 3억 4000만 km 떨어진 곳에 있는 하야부사2에 명령을 전달하는 데 걸리는 시간은 약 19분, 터치다운을 중지시키는 프로그램을 보내는 제한 시간은 6시 43분이었다. 그 이후, 하야부사 2는 기체의 위치와 자세 등을 스스로의 판단으로 제어하면서 터치다운에 들어간다. 관제실에서는 아무런 도움을 줄 수 있다. '쓰다 유이치' 프로젝트 매니저를 비롯한 많은 관계자들이 모든 것을 하야부사2에 맡기게 된다.
드디어 2019년 2월 22일, 'JAXA(작사, 일본 우주항공연구개발 기구)'의 소행성 탐사선 '하야부야 2'가 지구에서 3억 400만 Km 떨어진 소행성 류구에 착륙해 암석과 모래 등을 채취한 다음 부상하는 '터치다운(Touchdown)'을 실시했다. 2019년 2월 22일에 하야부사2가 터치다운을 시도한 지점은 류구 적도 부근에 있는 반지름 3m 정도의 비교적 평탄한 영역이다. 이 장소는 나중에 '디마테바코(전설상의 보물 상자)'라는 이름이 붙었다. 하야부사2는 원래 사방 100m인 영역 어딘가에 터치다운할 수 있는 정밀도로 설계되었다. 그런데 이 시도에서는 갑자기 기체가 빠듯하게 끼일 정도의 좁은 영역에 정밀 터치다운하게 된 것이다.
'쓰다 유이치(津田雄一)' 프로젝트 매니저는 '통신에 시차가 있는 상황에서, 20km 상공에서 야구장의 투수 마운드에 착륙하는 것과 같다'는 말로, 예상 이상의 어려움을 표현했다. 그러나 결과는 성공이었다. 터치다운 후에 도착한 류구의 영상에는 목표 장소에 정확히 착륙한 흔적이 남아 있었다.
그리고 2019년 4월에도 인공화구를 만드는데 성공했다. 또 2019년 7월에는 인공 화구 근처에 있는 장소에서 두 번째 터치다운을 실시해 지하 물질이 섞인 샘플을 채취했다. 소행성의 두 지점에서 각각 다른 깊이에 있는 물질을 채취한 것은 세계 최초의 일로, 앞으로 한동안은 흉내낼 수 없는 성과라고 생각된다. 더구나 이 두 차례의 터치다운은 특별한 어려움 없이 성공했다.

3-6. 샘플 채취 외의 성과
하야부사2는 2018년 9월 21에 소형 탐사차 '미네르바-II(MINERVA-II)'를 '류구'에 투하하는 데 성공했다. '미네르바-II(MINERVA II-)'라는 소형 탐사 로봇을 분리해 류구 표면에 착륙시킨 일은 하야부사2가 처음 이룬 공적이다. 아래의 이미지는 하야부사2에 탑재된 3개의 착륙선 '미네르바-II'이다. 사실은 하야부사1에도 미네르바라는 소형 탐사 로봇이 탑재되어 있었다. 그런데 분리에는 성공했지만 '이토카와' 표면에는 착륙하지 못했다. '미네르바-II'은 류구 표면을 날듯이 이동하면서 표면을 관측했다.
2018년 10월 3일에는 소형 착륙기 '마스코트(MASCOT)'를 '류구'에 투하하는 데 성공했다. '마스코트(MASCOT)'는 독일과 프랑스가 공동 개발한 소형 착륙선이다.
4. '하야부사2'의 귀환
하야부사2는 2019년 2월 22일과 2019년 7월 11일에 소행성 류구에 터치다운하는데 성공하고, 류구의 샘플을 '캡슐(Capsule)'에 채취했다. 하야부사2는 그 캡슐을 싣고 2019년 11월에 류구를 출발했다. '하야부사2'가 류구를 향해 가는 과정은 3년 반이라는 시간이 걸렸지만, 지구로 귀환하는 작업은 1년 만에 완료되었다. 귀환 시간이 훨씬 더 짧은 이유는, 샘플이 들어 있는 캡슐을 지구 대기권 밖에서 방출하기 때문에 지구와의 상대 속도를 0으로 할 필요가 없기 때문이다.
4-1. 궤도 수정을 반복하며 캡슐을 분리했다.
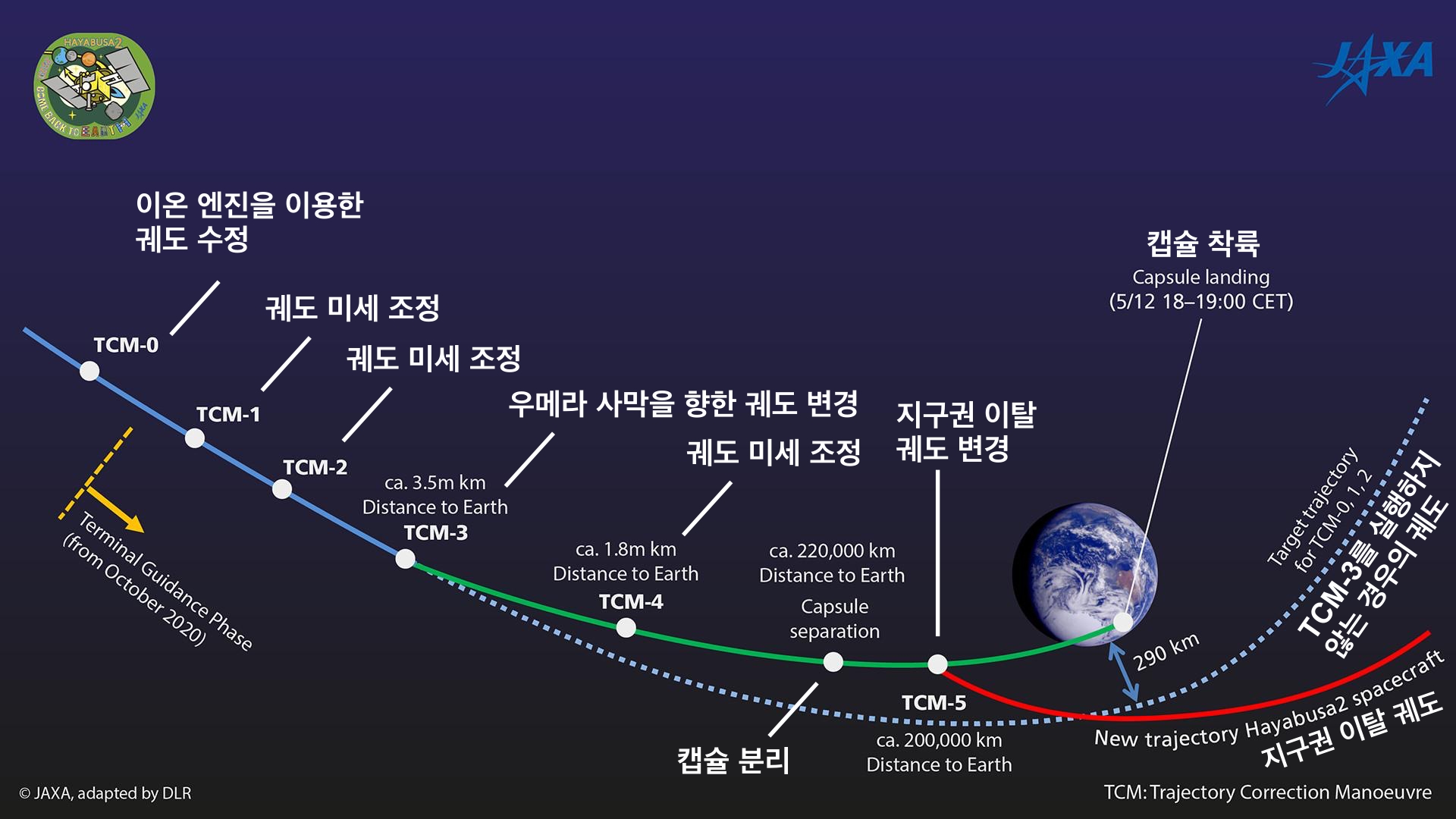
'하야부사'는 2020년 9월에 궤도를 수정한 다음 '이온 엔진(ion engine)'을 정지시키고, 그 후에는 '화학 엔진'을 사용해 다시 궤도를 수정하면서 지구로 접근했다. '이온 엔진(ion engine)'은 '전리된(이온화된)' 가스를 전기적으로 가속해 분출하는 장치이다. 여러 차례에 걸쳐 실시된 'TCM'이라는 궤도 수정 중에서도 특히 긴장감이 높았던 것이 2020년 11월 25~29일 무렵에 실시된 'TCM-3'라는 대폭적인 궤도 수정이다. 그리고 2020년 12월 1일에 'TCM-4'라는 궤도 미세 수정이 이루어진 다음, 12월 5일에 캡슐이 하야부사2에서 분리되었다. TCM-3와 TCM-4로 정확하게 궤도를 수정하는 일이 캡슐의 정확한 지구 귀환 여부를 결정하는 열쇠를 가지고 있다. 이러한 TCM 운용에 들어간 이후부터 JAXA 사가미하라 캠퍼스에 특별 체제를 갖추고 관제를 했다. '프로젝트 매니저'와 '항해 책임자(Flight Drector)' 등 통상 운용에는 참가하지 않는 역할 분담자까지 참여해, 통상 운용에서는 몇 명으로 운용하는 일을 TCM 운용에서는 20명 가까운 인원으로 운용했다.
4-2. 캡슐 분리
TCM-4 이후 하야부사2는 자세를 크게 바꾸었다. 여기에서 자세를 바꾼 이유는 캡슐에는 스스로 궤도를 수정할 능력이 없기 때문이다. 캡슐은 지구 대기에 돌입할 때 방향이 정확하므로, 그 방향에 맞추기 위해 본체의 궤도의 수정이 필요해진다.
하아부사2의 미션 매니저인 '요시카와 마코토' 부교수는 '캡슐 분리(Capsule Separation)'를 앞둔 당시의 심정을 다음과 같이 말했다. "하야부사2는 지금까지 정해진 자세로 항해했지만, 캡슐을 분리할 때는 단시간에 자세를 빙그르르 바꾼다. 그리고 캡슐을 분리하는데, 정확히 분리할 수 있을지 긴장이 높아진다. 하지만 지금까지 하야부사2는 캡슐을 분리하는 동작보다 훨씬 고난도의 동작을 성공시켰기에, 아마도 캡슐 분리도 성공적으로 수행할 것이다. 심경은 자신은 있지만 안심할 수는 없다라고 할 수 있다."
캡슐을 분리할 때 하야부사2와 지구 사이의 거리는 약 22만km나 된다. 왜 이 거리에서 캡슐을 분리할까? 캡슐을 정확하게 지구에 착륙시키기 위해서는 되도록 지구에 접근한 다음 분리하는 것이 좋다. 그러나 하야부사2는 캡슐을 분리한 다음 최대한 빨리 지구에서 멀어지지 않으면 대기권에 돌입하게 된다. 이 두 가지 요소를 감안한 거리가 약 22만 km라고 한다. 그러나 이 거리는 캡슐에게는 상당히 먼 거리이다. 원래 'ISS(국제 우주 정거장)'이 약 400km의 위치에 있는 것을 생각하면, 약 22만 km라는 거리는 턱없이 먼 거리임을 알 수 있다. 그렇게 먼 거리에서 캡슐이 스스로 궤도를 수정하지 않고, 오스트레일리아의 우메라 사막이라는, 미리 정해진 장소에 착륙하는 것이다. 하야부사2가 얼마나 정확하게 목표를 정해야 하는지 알 수 있을 것이다.
4-3. 캡슐 분리 후 하야부사2의 본체는 지구를 떠났다.
캡슐을 분리한 다음 '하야부사2'의 본체는 바로 자세를 바로잡고, 지구에서 20만 km의 위치까지 접근했다. 그리고 캡슐이 지구에 돌입하는 모습을 촬영하기 위해 다시 자세를 바꾸었다. 캡슐 촬영을 마친 후에는 다시 자세를 바꾸어 'TCM-5'라는 궤도 변경을 한 다음 다시 우주 공간으로 떠났다. 캡슐이 분리된 이후의 하야부사2의 본체는 새로운 소행성을 탐사하는 여행을 갔다. 만약 캡슐을 분리할 수 없는 경우에는 앞선 '하야부사1'과 마찬가지로 탐사선째로 대기권에 돌입하는 상황도 고려되었다. 무사히 캡슐이 분리될지, 그리고 하야부사2는 다시 우주 공간으로 여행을 떠날 수 있을지 긴장되는 상황이었지만, 원래의 계획대로 이루어졌다.
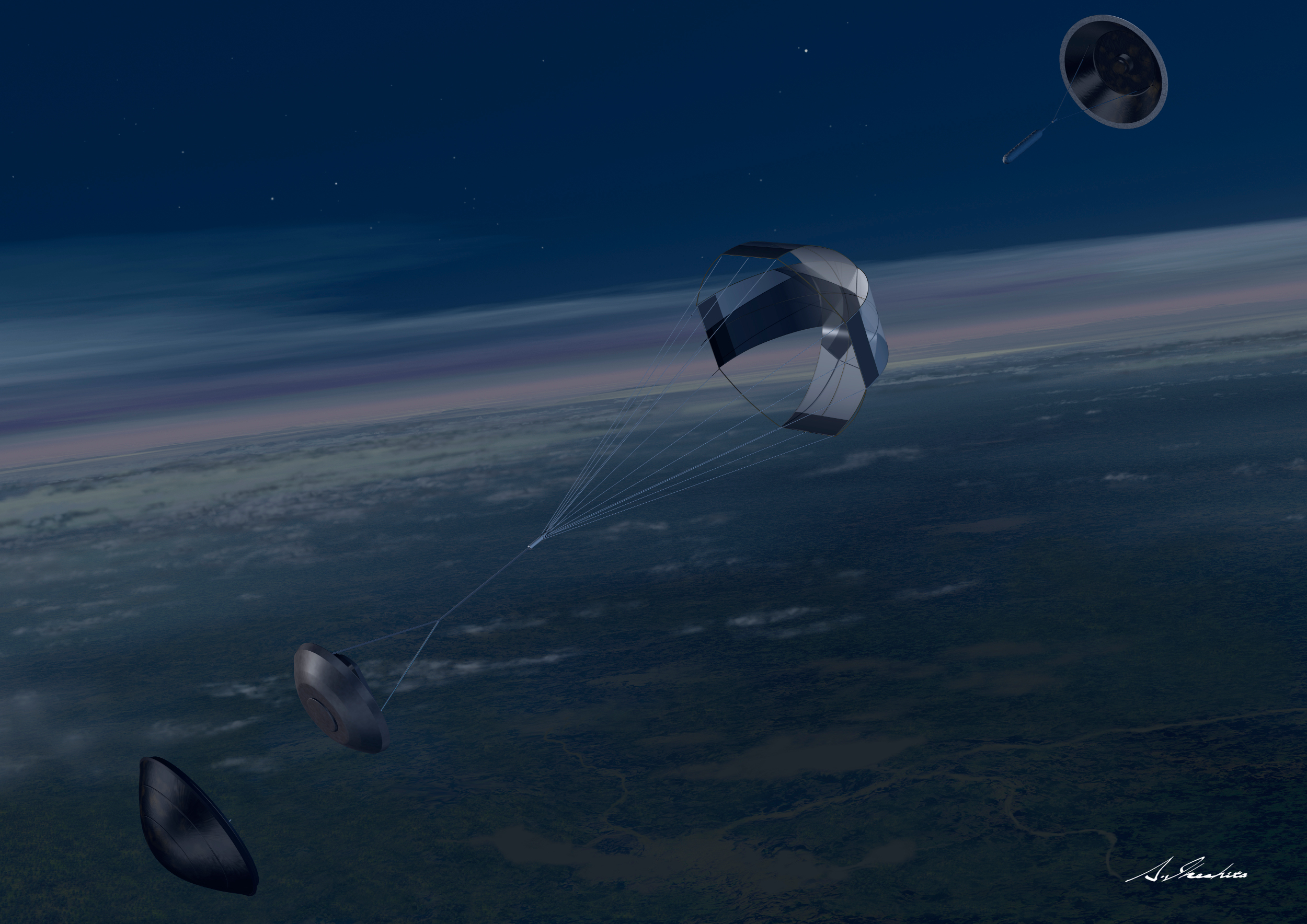
분리된 캡슐은 뚜껑 덮인 냄비 같은 모양인데, 대기권에 돌입할 때는 둥그런 금색 부분을 지구 쪽으로 향한 자세가 된다. 그리고 고도 10km 지점에서 낙하산을 펼쳐 지구에 착륙했다. 그리고 순조롭게 캡슐이 분리되어 2020년 12월 6일, 오스트레일리아의 우메라 사막에 캡슐이 착륙했다. 이러한 복잡한 동작을 모두 성공시켜야만 캡슐이 지구에 무사히 귀환할 수 있었다. 이 장소는 하야부사1의 캡슐이 착륙 한 장소와 같다. 원래 오스트레일리아에는 코로나19로 인해 입국이 제한되고 있었는데, 하야부사2 프로젝트팀의 회수팀만 특례 조치로 입국이 허용되었다.
또 착륙 직전의 캡슐은 불덩이가 되고, 착륙 지점 부근에서는 맨눈으로도 확인할 수 있었다. 하야부사2의 밝기를 추정하기는 어려운데, 2015년 하야부사2가 실시한 지구 '스윙바이(Swing-by)' 때는 일본에서도 그 모습이 관측되었다.

4-4. 다시 긴 여정에 나서는 하야부사2
캡슐을 분리한 다음 하야부사2는 어디로 갈까? 앞선 하야부사1의 경우는 캡슐을 분리한 다음 본체도 대기권에 돌입해 그 수명을 마쳤다. 그러나 하야부사2는 캡슐을 분리하는 데 성공한 다음 특별한 이상이 없으면 다시 지구를 떠나, 나머지 힘을 사용해 새로운 소행성 탐사에 나선다. 하야부사2는 2020년 11월 상순 기준으로, 커다란 문제가 생기지 않은 까닭에 이온 엔진의 연료 약 절반이 남아 있어 새로운 임무를 수행할 수 있다.
하야부사2의 새로운 임무는 대략 다음과 같은 내용이다. 2026년 7월에 소행성 '이토카와'나 '류구'와는 다른 희귀한 유형의 L형 소행성으로 분류되는 소행성 '2001CC21'로 '플라이 바이(Flyby, 접근 통과하면서 실시하는 관측)'한다. 그다음 하야부사2는 지구의 중력을 이용해 가속하는 '스윙 바이(Swingby)'를 반복하며 2031년 7월에는 소행성 '1988 KY26'과 '랑데부(천체에 도착해 그곳에 머무는 것)'를 한다. '1988 KY26'에는 탄소질이 많이 포함되었을 가능성이 있고, 물이 존재할 가능성도 있다고 한다.
4-5. 최종 목표는 '1988KY26'
2030년 쯤 되면 하야부사2는 지금보다 훨씬 기능이 떨어져 있을 것이다. 만약 이온 엔진의 수명이 다하면 이 임무는 완료할 수 있다. 하야부사2의 최종 목표인 '1988 KY26'은 그 자전 주기가 겨우 10분으로 매우 빠르게자전하고 있다. 지름이 30m에 지나지 않아 중력은 약하고, 중력에 비해 자전에 의한 원심력이 압도적으로 강한 소행성이다. 이 소행성에 접근해 관측하면 그것이 하나의 바위인지 아니면 바위의 집합체인지 알 수 있다. 그리고 만일 바위의 집합체라면 약한 중력에서 어떻게 바위끼리 달라붙어 있는지 알게 될 것이다. 그렇다면 이런 크기의 천체가 만일 지구의 대기권에 돌입했을 때, 어떤 피해가 생길지 알 수 있는 단서를 잡게 될 것이다.
지구에 충돌해 공룡 멸종의 계기가 되었던 운석은 지름 10km 정도의 천체였다고 생각된다. 한편, 2013년 2월 15일, 러시아 우랄 지방에 떨어져 1500명 가까이 부상자를 낸 '첼라빈스크 운석'은 대기권에 돌입할 때의 지름이 17m였다고 한다. '1998 KY26' 정도 크기의 천체는 공룡을 멸종시킨 운석만큼 크지 않지만, 지금까지 수백 년에 하나 정도의 빈도로 지구와 충돌하고 있다. 만일 이런 크기의 천체가 지구에 충돌하면, 상당히 큰 피해가 발생할 것으로 예상된다. 따라서 이런 크기의 천체가 어떤 구조를 하고 있는지 알 수 있다면, 그 피해를 최소한으로 줄일 힌트를 얻을 수 있을 것이다.
5. 류구의 암석을 분석하면 무엇을 알 수 있는가?
5-1. 지구에 떨어지는 운석은 소행성에서 온 것
그렇다면 류구에서 샘플을 채취하는 데는 어떤 의의가 있을까? 먼저 지구에 떨어지는 운석의 기원에 다가설 수 있다는 점이다. 운석 중에는 물이나 유기물을 함유한 '탄소질 콘드라이트'라는 종류가 있다. '탄소질 콘드라이트'의 기원이라고 여겨지는 것이 류구처럼 암석 속에 물과 유기물을 함유한다고 생각되는 'C형 소행성'이다. 결국, 류구와 '탄소질 콘드라이트'에 함유된 물과 유기물을 비교함으로써, 'C형 소행성'과 '탄소질 콘드라이트'의 관계를 밝히려는 것이다.
실제로 '하야부사 1'이 가지고 돌아온 '이토카와(Itokawa)'의 미립자를 분석해, 규산염 광물로 이루어진 일반적인 운석인 '보통 콘드라이트'의 기원이 이토카와와 같은 'S형 소행성'이라는 사실을 밝혀냈다. 2010년에 지구로 귀환한 하야부사가 채취한 시료는 1mg도 되지 않았다. 하지만 그것만으로도 소행성 탐사의 세계적인 행방을 크게 좌우할 정도의 성과를 알렸다. 이번 성공으로 더 많은 사실을 알게 될 것이다.
그러면 '하야부사2'는 왜 하필 '류구'를 탐사했을까? 하야부사 프로젝트가 시작된 1996년 무렵은 지구에서 왕복할 수 있는 거리에 위치한 소행성이 3~4개밖에 발견되지 않았던 시대이다. 그래서 그중 하나인 '이토카와'가 탐사의 대상이 되었다. '하야부샤2 프로젝트'가 시작된 2006년 무렵에는 새로이 소행성이 발견되어 후보가 20~30개로 늘어났다. 그 가운데 소행성의 성질을 조사한 결과 'C형 소행성'에 해당하는 것이 류구 하나뿐이었다. 따라서 하야부사2는 류구를 목표로 삼았다.
5-2. 태양계의 '원재료'에 관한 정보를 얻을 수 있다.
또 류구 샘플 채취에는 태양계 탄생의 수수께끼에 다가선다는 목적도 있다. 지금으로부터 대략 46억 년 전, 우주를 떠다니는 가스와 먼지가 모여 태양과 지구, 그 밖의 행성 등이 생겨나 태양계가 형성되었다고 생각된다. 태양계 탄생 당시, 행서 정도로 크게 성장할 수 없었던 천체가 '이토카와'나 '류구' 같은 소행성이다. 도중에 성장을 멈춘 소행성은 그 후 46억 년 동안 태양을 계속 선회하고 있다.
그리고 소행성 같은 소천체는 행성처럼 대규모로 녹은 일이 없고, 더욱이 표면 내부까지 균질한 재료로 이루어져 있다. 즉, 대부분의 소천체는 '분화'되지 않고, 그 천체가 생길 당시에 그 장소에 어떤한 물질이 있었는가를 잘 보존하고 있는 셈이다. 따라서 결국 소행성은 46억 년 전 태양계의 '원재료'를 지니고 있을 가능성이 있으므로, 소행성은 '태양계의 화석'의 역할을 할 수 있다. 이러한 '화석'의 표면의 샘플을 수거하면 태양계가 생긴 초기의 상태를 알 수 있으므로, 류구에 포함된 물질을 분석하면 태양계 탄생 당시에 어떤 물질이 존재했는지 알 수 있을 것이다.
5-3. 생명 탄생의 수수께끼에 다가간다.
또 류구 샘플 채취에는 태양계와 생명 탄생의 수수께끼에 다가선다는 목적도 있다. 특히 류구의 암석은 생명의 바탕이 되는 물질인 물과 유기물을 품고 있을 것으로 여겨지기 때문에, 생명의 기원에 다가설 수 있을 것으로 기대된다.
더 구체적으로 알아보자. 'C형 소행성'은 일찍이 운석으로서 원시 지구에 많이 떨어져, 물이나 아미노산 등 생명에 필수적인 물질을 가져다주었다고 생각된다. 하야부사2가 채취한 시료에서 물이나 아미노산을 검출할 수 있다면, 생명의 탄생에 이르기까지의 역사를 밝히는 커다란 진전이 될 것이다. 단백질의 재료가 되는 '아미노산(Amino Acid)'이라는 유기물에는 서로 '거울상(Mirror Image)' 관계에 있는 '오른손형'과 '왼손형'이 존재하는 경우가 있다. 하지만 사실은 지구상의 생명을 구성하는 아미노산은 대부분이 '왼손형'인데 그 이유는 밝혀지지 않았다. 류구에 포함된 유기물에도 '왼손형'이 많은지를 조사하면 생명 탄생 수수께끼의 한 조각을 풀 수 있을 것으로 기대하고 있다.
6. 하야부사2 갤러리
6-1. 터치다운의 흔적
아래의 영상은 2019년 2월 22일 하야부사 2가 터치다운한 직후에 고도 약 25m에서 촬영된 류구의 표면이다. 영상 중앙의 거무스름한 영역은 착륙할 때 탄환을 발사했거나 부상하기 위해 '스러스터(Thruster)'를 분사했을 때 날아오른 모래 먼지 등이 덮여 있는 것으로 생각된다. 빨간색 원은 원래 목표한 반지름 3m의 착륙 예상 지점이다. '하야부사 2'는 이 원의 중심에서 약 1m 떨어진 위치에 착륙했다.
이 영상에는 몇 개의 검은 아지랑이가 피어오르고 있다. 이들은 하야부사 2의 카메라의 초점이 맞지 않은 위치까지 날아오른 암석의 파편이나 모래 먼지이다. 사실 터치다운 후 하야부사 2의 카메라에 들어온 빛의 양이 반으로 줄었다. 그 이유는 날아오른 모래 먼지 등이 카메라를 덮어 버렸기 때문이라고 생각된다. '쓰다 유이치' 프로젝트 매니저는 '일반적인 운용 범위에서는 문제가 없지만 카메라의 성능이 변했기 때문에, 앞으로 고정밀 제어가 필요한 터치다운을 할 때는 성능 변화를 확인해야 한다.'라고 말했다.

6-2. JAXA 사가미하라 캠퍼스 관제실
아래의 사진은 '하야부사2(Hayabusa2)'가 소행성 '류구(Ryugu)'에서 지구를 향해 출발하는 순간, 'JAXA(작사, 일본 우주항공연구개발 기구)'의 사가미하라 캠퍼스 관제실의 모습이다. 무사히 출발했음을 확인한 기쁨의 순간이다.
